INSPECTION, MAINTENANCE AND TROUBLESHOOTING
6.2.1 Troubleshooting Problems with Alarm Displaycont.
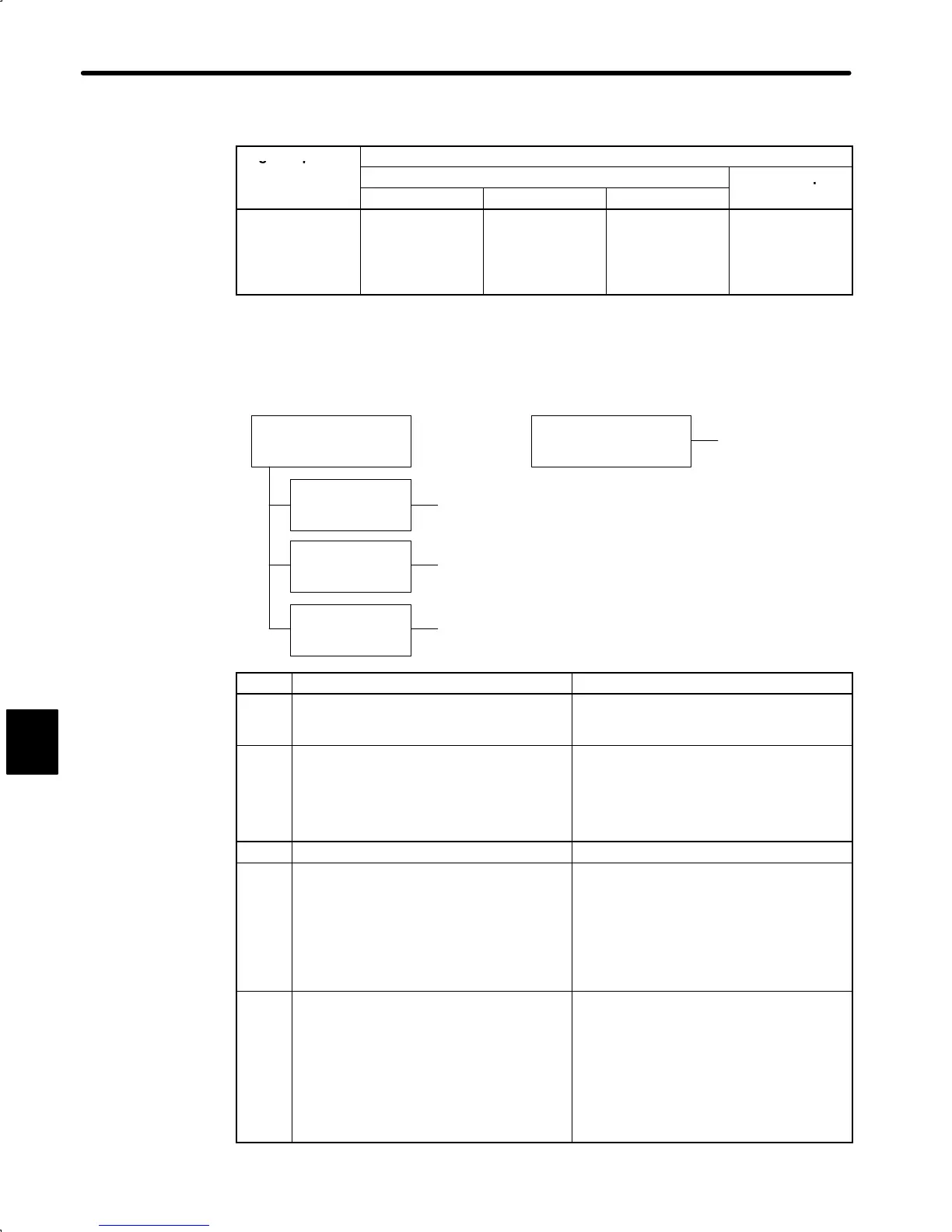
354
Display and Outputs
Digital Operator
Alarm Output
Display and
Alarm Code Output
Alarm Output
arm
ame
ALO1 ALO2 ALO3
A.80
Absolute encoder
error (only if
absolute encoder
is used)
OFF OFF OFF OFF
OFF: Output transistor is OFF
ON: Output transistor is ON
Status When Alarm Occurred
C
At power ON
Speed control
Cn-01 Bit 1 = 0
Speed control
Cn-01 Bit 1 = 1
During servomotor
operation
A
,
B
,
C
A
,
B
,
D
,E
Position control
A
,
B
,
C
Cause Remedy
A Incorrect absolute encoder wiring (PA, PB,
RESET, SEN signal (for speed control),
etc.)
Check and correct the absolute encoder
wiring.
B Absolute encoder malfunctioned
• For speed control (Cn-01 Bit 1 = 0), turn
SEN signal OFF and back ON.
• For speed control (Cn-01 Bit 1 = 1) or posi-
tion control, turn Servopack power OFF
and back ON.
C Circuit board (1PWB) defective Replace Servopack.
D
Error occurred in absolute encoder.
D For speed control (Cn-01 Bit 1 = 0), turn
SEN signal OFF and back ON (if
servomotor is rotating, first turn servo
OFF).
Another encoder alarm displayed when
SEN signal or power supply turned back
ON.
D For speed control (Cn-01 Bit 1 = 1) or
position control, turn Servopack power
OFF and back ON.
E Servopack miscounted pulses (positional
displacement) or malfunctioned due to
noise.
• Separate encoder wiring from main wiring
circuits.
• For speed control (Cn-01 Bit 1 = 0), turn
SEN signal OFF and back ON (if servomo-
tor is rotating, first turn servo OFF).
• For speed control (Cn-01 Bit 1 = 1) or posi-
tion control, turn Servopack power OFF
and back ON.
6
 Loading...
Loading...






