5.8.2 External Torque Limit
Use this function to limit torque by inputting a signal from the host controller at a specific times during
machine operation, such as forced stop or hold operations for robot workpieces.
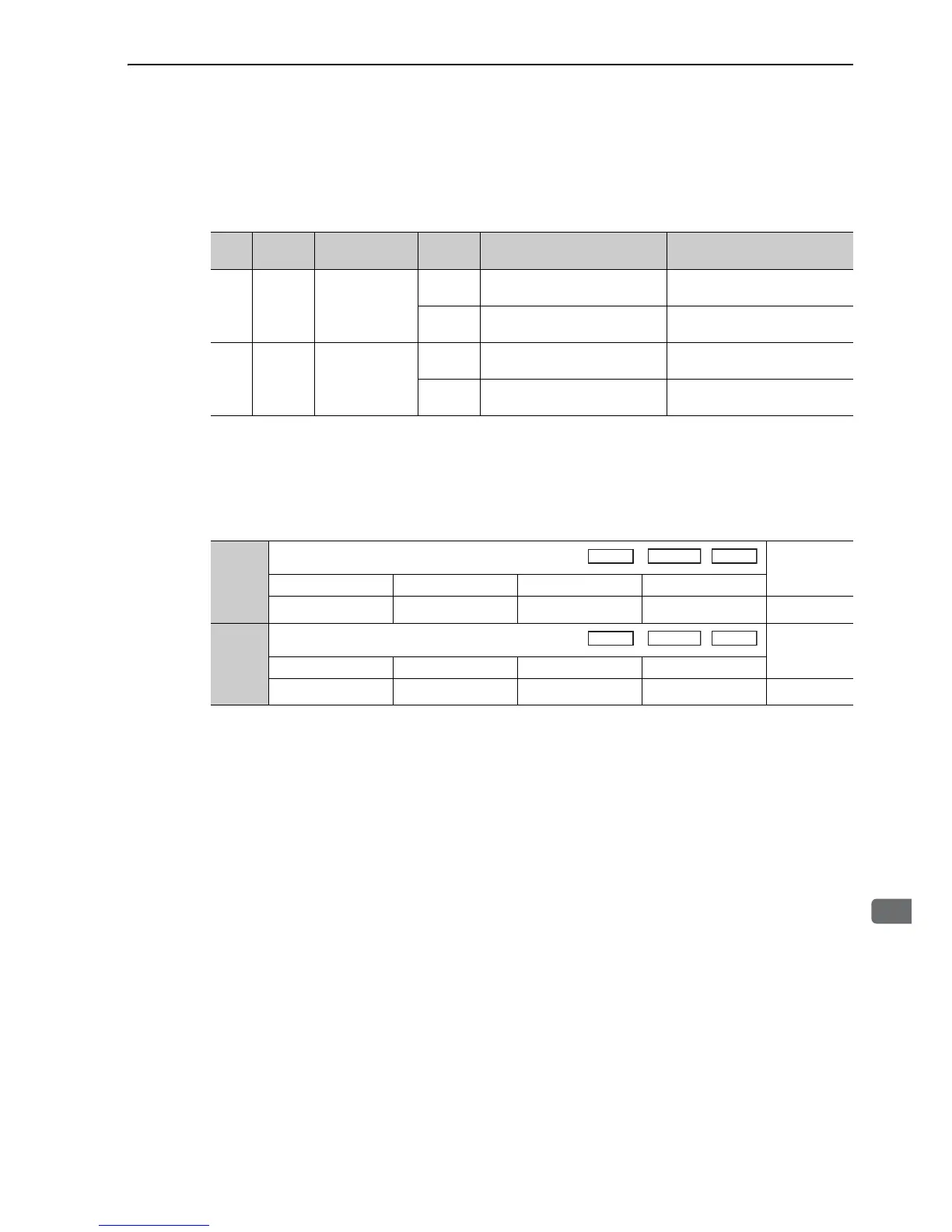
(1) Input Signals
Note: When using external torque limit, make sure that there are no other signals allocated to the same terminals as /P-CL
and /N-CL. When multiple signals are allocated to the same terminal, the signals are handled with OR logic, which
affects the ON/OFF state of the other signals. Refer to 3.3.1 Input Signal Allocations
.
(2) Related Parameters
Set the following parameters for external torque limit.
The setting unit is a percentage of the rated torque.
Type
Signal
Name
Connector
Pin Number
Setting Meaning Limit value
Input /P-CL
CN1-45
[Factory setting]
ON Forward external torque limit ON
The value set in Pn402 or Pn404
(whichever is smaller)
OFF
Forward external torque limit
OFF
Pn402
Input /N-CL
CN1-46
[Factory setting]
ON Reverse external torque limit ON
The value set in Pn403 or Pn405
(whichever is smaller)
OFF
Reverse external torque limit
OFF
Pn403
Pn404
Forward External Torque Limit
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 800 1% 100 Immediately
Setup
Pn405
Reverse External Torque Limit
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 800 1% 100 Immediately
Setup
Speed