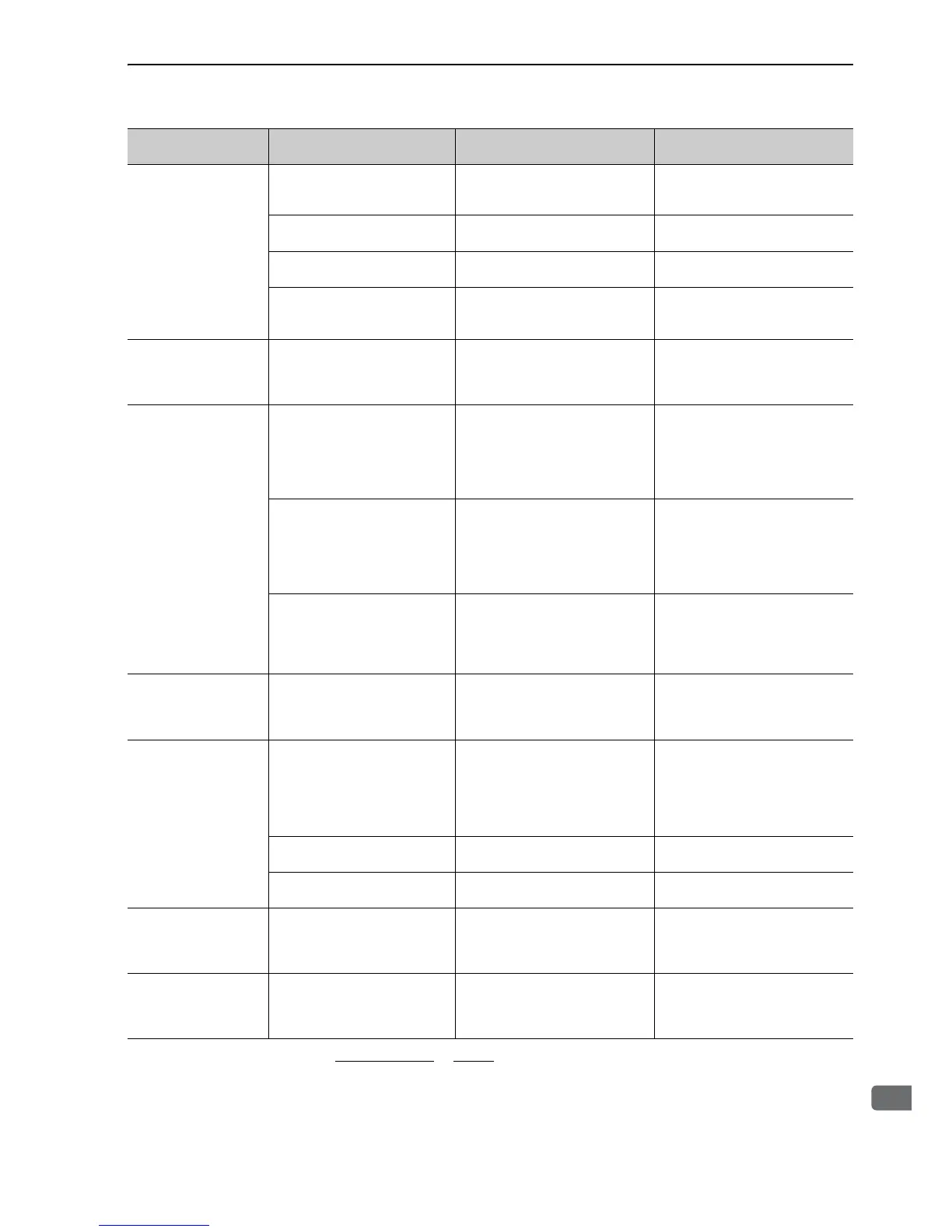
A.040:
Parameter Setting
Error 1
(The parameter setting
was out of the allowable
setting range.)
The SERVOPACK and servomo-
tor capacities do not match each
other.
Check the combination of SERVO-
PACK and servomotor capacities.
Select the proper combination of
SERVOPACK and servomotor
capacities.
A SERVOPACK fault occurred. −
The SERVOPACK may be faulty.
Replace the SERVOPACK.
The parameter setting is out of
the specified range.
Check the setting ranges of the
parameters that have been changed.
Set the parameter to a value within
the specified range.
The electronics gear ratio is out
of the setting range.
Check the electronic gear ratio. The
ratio must satisfy:
0.001< (Pn20E/Pn210) < 4000.
Set the electronic gear ratio in the
range: 0.001< (Pn20E/Pn210)
< 4000.
A.041:
Encoder Output Pulse
Setting Error
The encoder output pulse (Pn212)
is out of the setting range and
does not satisfy the setting condi-
tions.
Check the parameter Pn212. Set Pn212 to a correct value.
A.042:
Parameter
Combination Error
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the electronic gear ratio
(Pn20E/Pn210) or the servomo-
tor.
Check that the detection condi-
tions
*1
is satisfied.
Reduce the electronic gear ratio
(Pn20E/Pn210).
The speed of program JOG oper-
ation (Fn004) is lower than the
setting range after having
changed the setting of Pn533
"Program JOG Movement
Speed."
Check that the detection condi-
tions
*1
is satisfied.
Increase the setting for Pn533 "Pro-
gram JOG Movement Speed."
The moving speed of advanced
autotuning is lower than the set-
ting range after having changed
the electronic gear ratio (Pn20E/
Pn210) or the servomotor.
Check that the detection condi-
tions
*1
is satisfied.
Reduce the electronic gear ratio
(Pn20E/Pn210).
A.044:
Fully-closed Loop
Control Parameter
Setting Error
The setting of the option module
does not match with that of
Pn002.3.
Check the settings of Pn002.3.
The setting of option module must
be compatible with the setting of
Pn002.3.
A.050:
Combination Error
(The SERVOPACK and
servomotor capacities do
not correspond.)
The SERVOPACK and servomo-
tor capacities do not match each
other.
Check the capacities to see if they
satisfy the following condition:
(Servomotor capacity)/(SERVO-
PACK capacity) ≤ 1/4, or (Servo-
motor capacity)/(SERVOPACK
capacity) ≤ 4.
Select the proper combination of
SERVOPACK and servomotor
capacities.
An encoder fault occurred.
Replace the servomotor and see if
the alarm occurs again.
Replace the servomotor (encoder).
A SERVOPACK fault occurred. −
The SERVOPACK may be faulty.
Replace the SERVOPACK.
A.051:
Unsupported Device
Alarm
An unsupported serial converter
unit, serial encoder, or external
encoder is connected to the SER-
VOPACK.
Check the product specifications,
and select the correct model.
Select the correct combination of
units.
A.0b0:
Cancelled Servo ON
Command Alarm
After executing the utility func-
tion to turn ON the power to the
motor, the Servo ON command
was sent from the host controller.
−
Turn the SERVOPACK power sup-
ply OFF and then ON again.
∗1.
Alarm:
Alarm Name
Cause Investigative Actions Corrective Actions