310 Rockwell Automation Publication 1766-UM001I-EN-P - June 2015
Appendix F MicroLogix 1400 Distributed Network Protocol (DNP3)
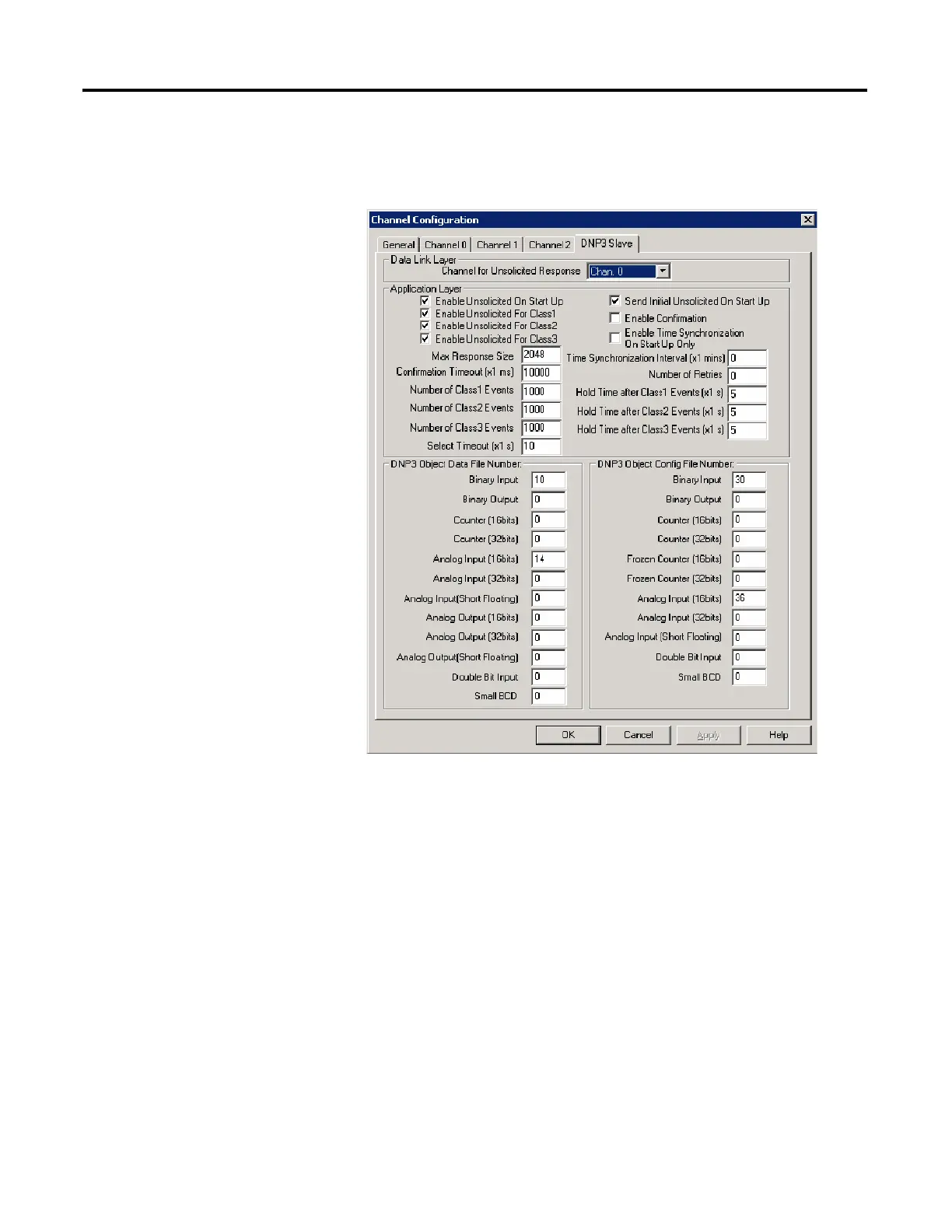
and all events of class 1, 2 and 3 are reported. Since Hold Times are configured to
5 seconds, generated events will be reported after 5 seconds.
Collision Avoidance
The MicroLogix 1400 controller currently supports the first of the two methods
listed below for collision avoidance.
• Detecting transmitted data (TX/RX line on RS485 communication).
• Detecting out-of-band carrier (DCD on RS232C communication).
When the MicroLogix 1400 is connected to RS485 network, it monitors all data
on the link. If the MicroLogix 1400 is preparing to transmit a packet and finds
the link busy, it waits for an interval defined by the Backoff_Time until it is no
longer busy.
Backoff_Time = Pre Transmit Delay (x1 ms) + Max Random Delay (x1 ms)
The Pre Transmit Delay (x1 ms) in the Link Layer Channel Configuration file is
a fixed delay and the Max Random Delay (x1 ms) in the Channel Configuration
file is a maximum random delay for Channel 0 and Channel 2. You must specify
those parameters to get the collision avoidance mechanism.

 Loading...
Loading...







