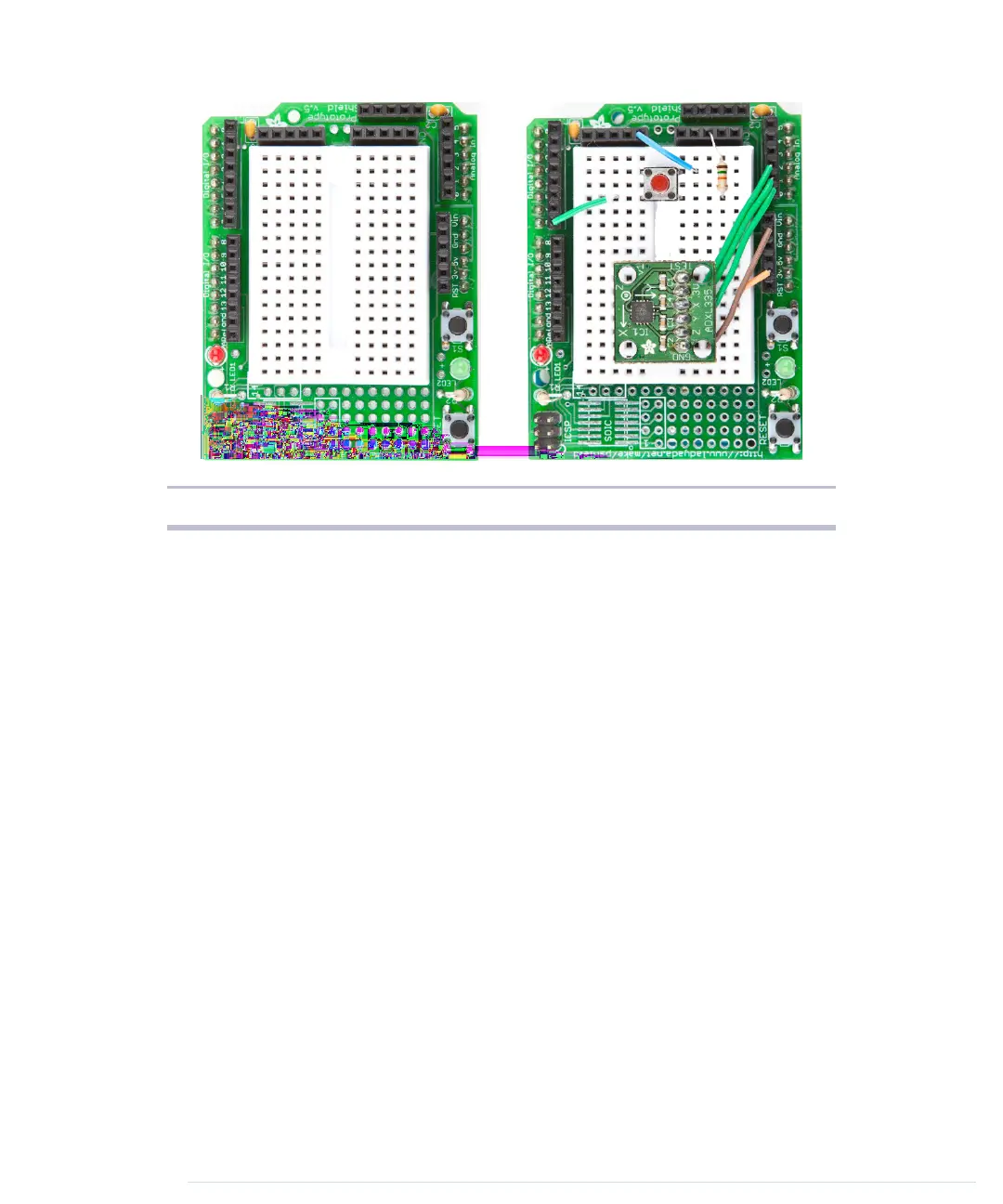
Figure 20—An empty Proto Shield (left), and one holding our game controller (right)
const unsigned int BUFFER_SIZE = 16;
const unsigned int BAUD_RATE = 38400;
int buffer[NUM_AXES][BUFFER_SIZE];
int buffer_pos[NUM_AXES] = { 0 };
boolean button_pressed = false;
Bounce button;
void setup() {
Serial.begin(BAUD_RATE);
pinMode(BUTTON_PIN, INPUT);
button.attach(BUTTON_PIN);
button.interval(20);
}
int get_axis(const int axis) {
delay(1);
buffer[axis][buffer_pos[axis]] = analogRead(PINS[axis]);
buffer_pos[axis] = (buffer_pos[axis] + 1) % BUFFER_SIZE;
long sum = 0;
for (unsigned int i = 0; i < BUFFER_SIZE; i++)
sum += buffer[axis][i];
return round(sum / BUFFER_SIZE);
}
int get_x() { return get_axis(0); }
int get_y() { return get_axis(1); }
int get_z() { return get_axis(2); }
Chapter 6. Building a Motion-Sensing Game Controller • 108
report erratum • discuss
www.it-ebooks.info

 Loading...
Loading...










