Parallax PING))) ultrasonic sensor
1
because it’s easy to use, comes with
excellent documentation, and has a nice feature set. It can detect objects in
a range between 2 centimeters and 3 meters, and we use it directly with a
breadboard, so we don’t have to solder. It’s also a perfect example of a sensor
that provides information via variable-width pulses. (More on that in a few
paragraphs.) With the PING))) sensor, we can easily build a sonar or a robot
that automatically finds its way through a maze without touching a wall.
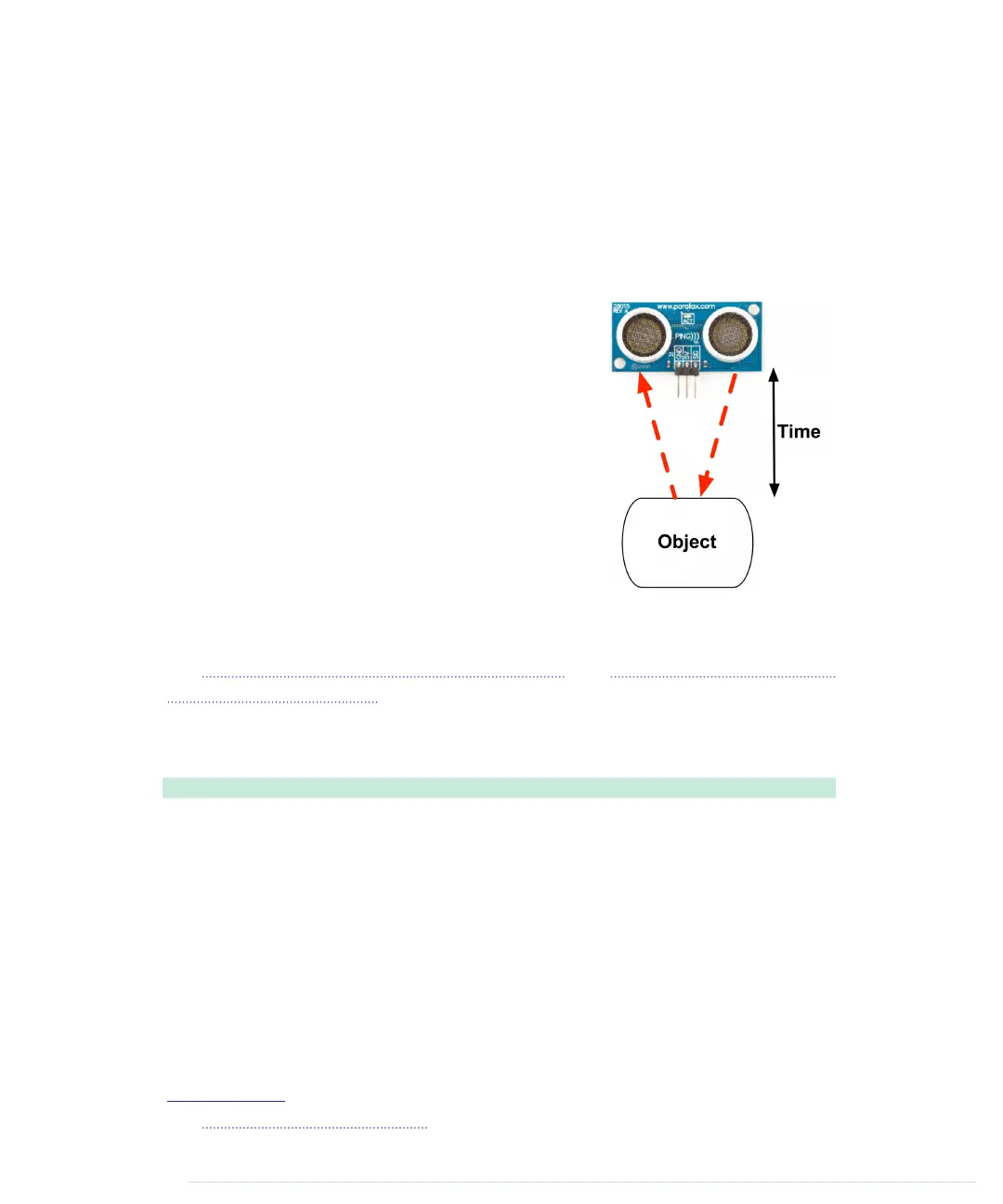
As mentioned earlier, ultrasonic sensors usually
don’t return the distance to the nearest object.
Instead, they return the time the sound needed
to travel to the object and back to the sensor.
The PING))) is no exception, and its innards are
fairly complex. Fortunately, they are hidden
behind three simple pins: power, ground, and
signal.
This makes it easy to connect the sensor to the
Arduino. First, connect Arduino’s ground and
5V power supply to the corresponding PING)))
pins. Then connect the PING)))’s sensor pin to
one of the Arduino’s digital IO pins. (We’re using
pin 7 for no particular reason.) For a diagram and for a photo of our circuit,
see Figure 15, PING))) basic circuit, on page 80 and Figure 16, Photo of PING)))
basic circuit, on page 81.
To bring the circuit to life, we need some code that communicates with the
PING))) sensor:
InputDevices/Ultrasonic/Simple/Simple.ino
const unsigned int PING_SENSOR_IO_PIN = 7;
Line 1
const unsigned int BAUD_RATE = 9600;
-
-
void setup() {
-
Serial.begin(BAUD_RATE);
5
}
-
-
void loop() {
-
pinMode(PING_SENSOR_IO_PIN, OUTPUT);
-
digitalWrite(PING_SENSOR_IO_PIN, LOW);
10
delayMicroseconds(2);
-
-
digitalWrite(PING_SENSOR_IO_PIN, HIGH);
-
delayMicroseconds(5);
-
1.
http://www.parallax.com/product/28015
report erratum • discuss
Measuring Distances with an Ultrasonic Sensor • 79
www.it-ebooks.info

 Loading...
Loading...










