110 EM-ABS-01 for ACU 03/12
8.4.13 Instructions on positioning (configuration x40)
If positionin
(confi
uration x40) and an absolute value encoder are used, a distinction
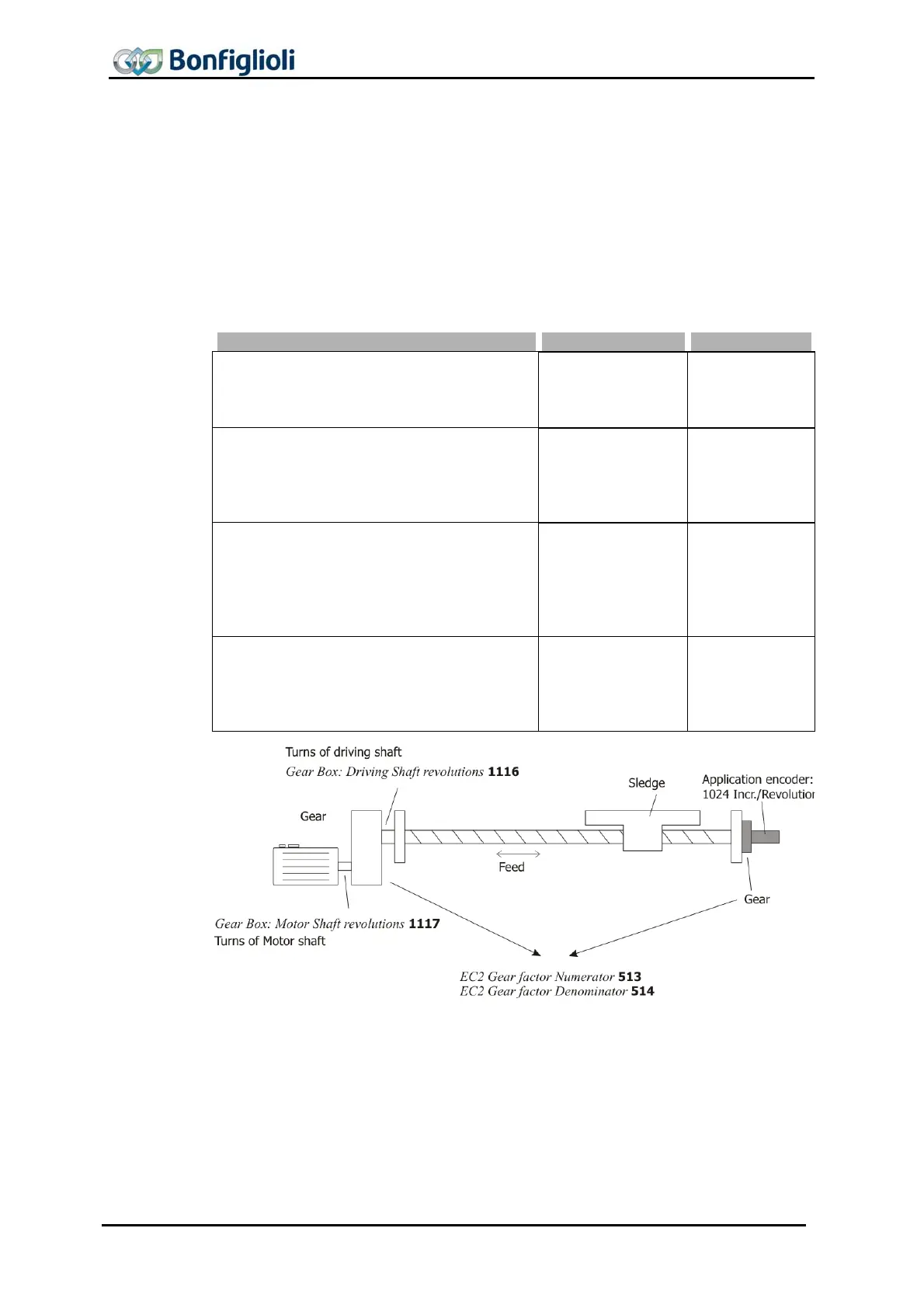
is made for parameterization between “motor encoders” and “application encoders”.
The motor encoder is always needed for speed control and can also be used for posi-
tion control in the case of no-slip systems.
n application encoder for position control is used in systems where slip may occur for
slip compensation. This encoder is also often referred to as an “External encoder” o
Synchronous encoder”.
With the present EM-ABS-01 module, the following configurations are possible:
System slip Motor type Configuration
no-slip system,
high speed precision:
absolute value encoder at motor
for speed control and position control
synchronous ser-
vomotor & asyn-
chronous motor
540 &
240
no-slip system,
low speed precision:
absolute value encoder as application encode
for position control of motor model with speed
control
synchronous ser-
vomotor
640
slipping system,
high speed precision:
absolute value encoder as application encoder
for position control
HTL encoder as motor encoder for speed con-
trol
asynchronous mo-
tor
240
slipping system,
low speed precision:
absolute value encoder as application encoder
for position control
motor model for speed control
synchronous ser-
vomotor & asyn-
chronous motor
640 &
440
n internal format (referred to as 16/16) is used for speed control and calculation o
the positionin
tra
ectory. The 16 less si
nificant bits represent the position an
le on a
motor revolution, the 16 more significant bits represent the number of motor revolu-
tions.
The positioning offers the user so-called “user units” (abbreviation [u]), which enable
ad
ustment to any application via the reference system. In this way, the resolution o
the smallest unit for positioning can be parameterized (e.g. 1 mm, 4 mm, 0.01 °, etc.).
For more information on the reference system, refer to the application manual “Posi-
tioning”.

 Loading...
Loading...

