80 ADL300 • Functions description and parameters list
19 - VF PARAMETERS
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.1 2400 Voltage flux boost perc FLOAT CALCF 0.0 15.0 RWS _V_
Fixed voltage boost level. Value dened during self-tuning.
The motor ux level is controlled in vector mode. For pure V/f control, set this parameter to zero.
Increase the value slightly in case of low torque at low speed.
Increase the value slightly in case of high current with motor saturation or very long motor cables.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.2 2402 Voltage boost gain V/A FLOAT CALCF 0.0 0.0 ERWS _V_
Setting of the boost ux magnetising current regulator gain.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.3 2404 Voltage torque boost ENUM Enable 0 1 ERWZ _V_
Enables vector torque compensation. For pure V/f control, disable this parameter.
0 Disable
1 Enable
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
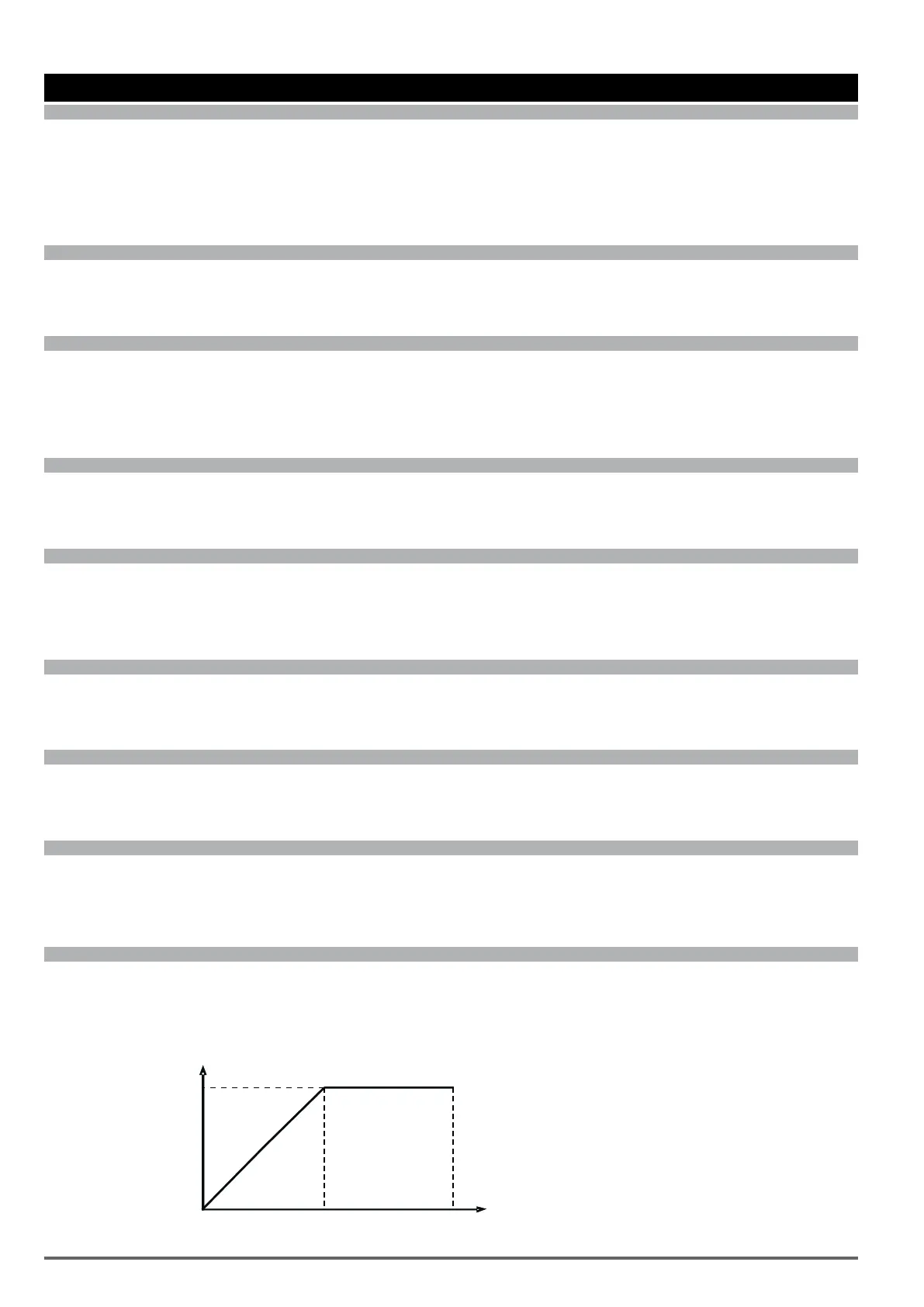
19.4 2406 Vf voltage V FLOAT CALCF 10.0 690.0 ERWZS _V_
Setting of the maximum voltage value to be applied at the motor terminals (usually set according to the motor data plate).
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.5 2408 Vf frequency Hz FLOAT CALCF 10.0 2000.0 ERWZS _V_
Setting of the motor rated frequency (indicated on the motor data plate)
This is the frequency at which the drive output voltage reaches the maximum output voltage (Vf voltage) on the motor.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.6 2410 Vf voltage 1 V FLOAT CALCF CALCF CALCF ERWZS _V_
Setting of an intermediate voltage value for the custom V/f characteristic curve.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.7 2412 Vf frequency 1 Hz FLOAT CALCF 0.0 CALCF ERWZS _V_
Setting of an intermediate frequency value for the custom V/f characteristic curve.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.8 2414 Vf voltage 0 V FLOAT 0.0 0.0 CALCF ERWZS _V_
Compensation of IR voltage drop at 0 Hz. This parameter must be increased in case of pure V/f control. The increase
depends on the size of the motor. Values that are too high could cause an overcurrent and motor saturation.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.9 2430 Vf shape ENUM Linear 0 1 ERWZS _V_
Selection of the type of V/f characteristic curve
0 Linear
1 Custom
Par.2406
Par.2408

 Loading...
Loading...








