86 ADL300 • Functions description and parameters list
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
20.3.3 3204 Motor ovld time s FLOAT 30.0 10.0 300.0 ERWS FVS
Setting of the motor overload duration in seconds. It represents the moment in which the protection (“Motor Overload”) is
enabled, if the motor current value is above the overload set in the Motor ovld factor parameter. This alarm can be as-
signed to a programmable digital output (Motor overload trip).
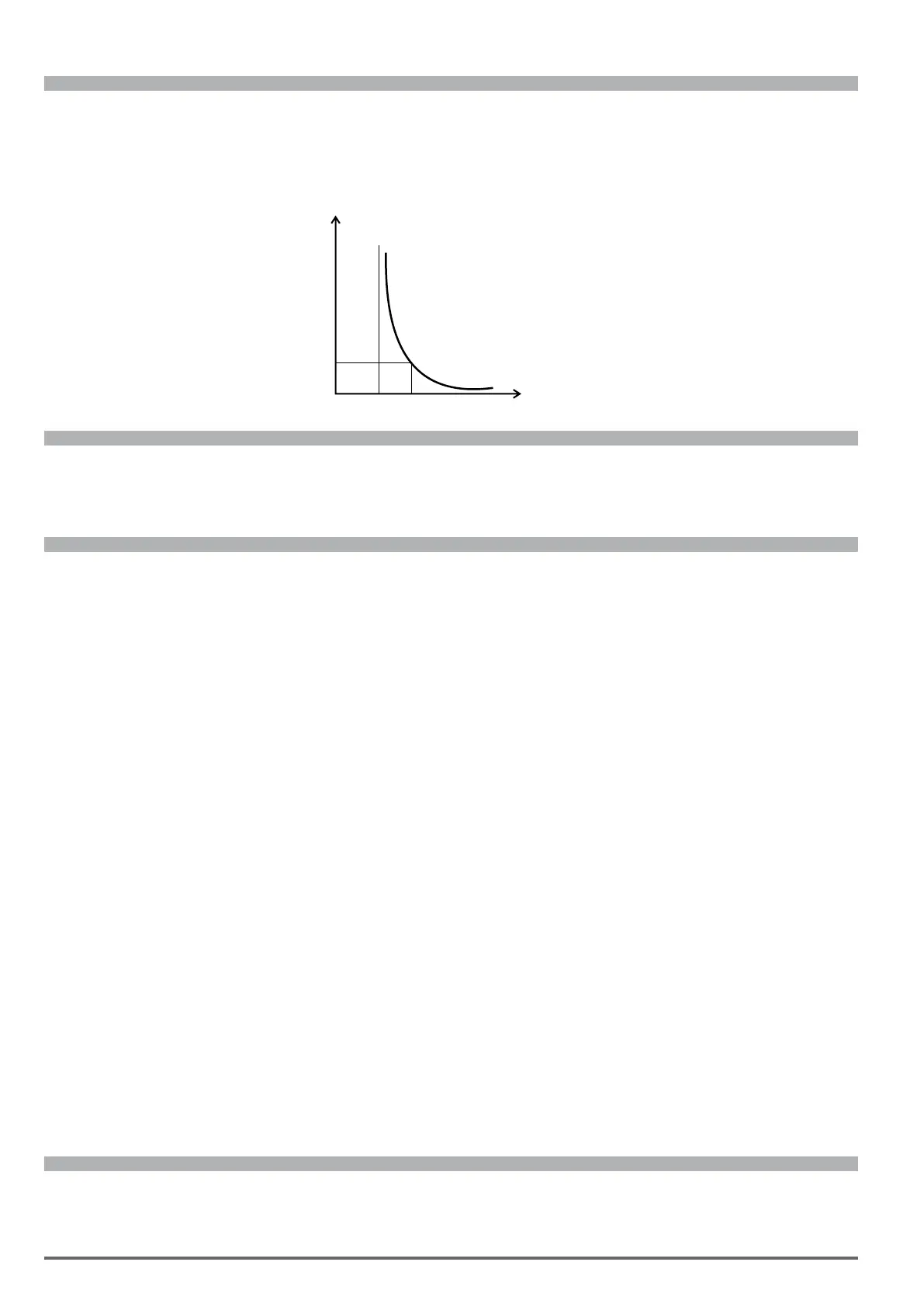
The trip time depends on the motor current value and is as follows:
Motor ovld factor
Rated current
Trip time [s]
Motor current [%]
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
20.3.4 3206 Motor service factor perc FLOAT 100.0 25.0 200.0 ERWS FVS
Setting of the motor service factor. This is the dierence between the peak current and rated current. It is used to calculate
the thermal image of the motor.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
20.3.5 3216 Motor fan type ENUM Servo fan 0 1 ERW FVS
This parameter is used to set the type of motor cooling system.
0 Auto fan
1 Servo fan
Auto fan indicates the presence of a fan unit mounted on the motor shaft that therefore turns at a speed proportional to the mo-
tor speed. Cooling is not very eective at low motor speeds.
Servo fan indicates the presence of an independent fan unit that therefore always runs at the rated speed. It ensures optimum
cooling eciency at all motor speeds.
When the current motor speed is below (PAR 2004 Rated speed / 2) and PAR 3216 Motor fan type = Auto fan; , the MOTOR
OVERLOAD protection intervention time must be reduced as cooling is insucient.
At below (PAR 2004 Rated speed / 2) the protection intervention time is reduced by reducing the direct current of the MOTOR
OVERLOAD function.
When the motor speed is equal to (PAR 2004 Rated speed / 2) the direct current of the MOTOR OVERLOAD function is equal
to PAR 2002 Rated current * PAR 3206 Motor service factor, , whereas below that limit it is modied following a linear pattern
until PAR 2002 Rated current * 3206 Motor service factor * PAR 3218 Motor derat factor when the motor speed reaches
zero.
The overload current of the MOTOR OVERLOAD function is obtained by PAR 2002 Rated current * 3206 Motor service factor
* PAR 3202 Motor ovld factor and is the maximum current that can circulate in the motor. If the MOTOR OVERLOAD function
is enabled the drive automatically sets the torque current limit so that Iout max. does not exceed this value.
With the MOTOR OVERLOAD function a current equal to the Overload level is supplied to the motor for the maximum time set
in PAR 3204 Motor ovld time, The slower the motor speed, the shorter the time allowed (see gure at beginning of chapter).
After the set time, the MOTOR OVERLOAD function automatically sets the torque current limit so that Iout max. does not exceed
the direct current of the MOTOR OVERLOAD function.
When the motor current speed exceeds (PAR 2004 Rated speed / 2) and PAR 3216 Motor fan type = Auto fan, the direct cur-
rent is not reduced as cooling is sucient.
When PAR 3216 Motor fan type = Servo fan, the direct current is not reduced as cooling is sucient.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
20.3.6 3218 Motor derat factor perc FLOAT 50.0 0.0 100.0 ERWS FVS
This parameter is used to set the derating factor. The value is expressed as a percentage of PAR 2002 Rated current *
PAR 3206 Motor service factor.

 Loading...
Loading...







