HIMax System 3 Product Description
HI 801 001 E Rev. 4.01 Page 37 of 122
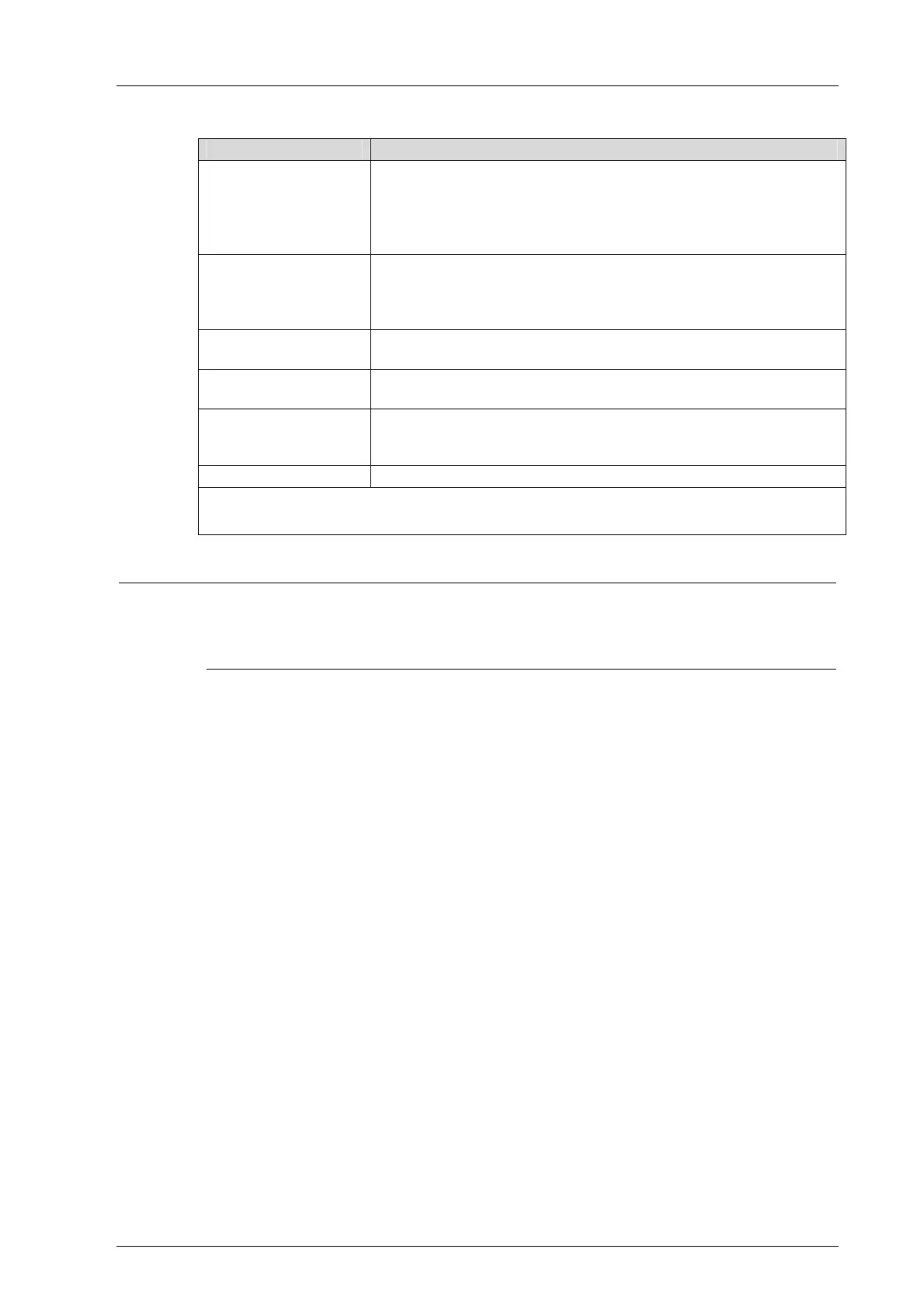
Table 12 specifies how the user may intervene during the corresponding states.
State Possible user interventions
LOCKED
Changing the factory settings
Setting the mode switch to Stop
1)
to enter the STOP state
Setting the mode switch to Run to enter the RUN state
Using a PADT command to enter the STOP state
Using a PADT command to enter the RUN state
STOP/VALID
CONFIGURATION
Loading the user program
Starting the user program
Loading the operating system
Taking preliminary actions for forcing variables
STOP/INVALID
CONFIGURATION
Loading the user program
Loading the operating system
STOP/OS_DOWNLO
AD
None. Once the loading process is completed, the processor
module enters the STOP state.
RUN
Stopping the user program
Forcing variables
Online Test
RUN/UP STOP
Using a PADT command to enter the STOP state
1) STOP/VALID CONFIGURATION or STOP/INVALID CONFIGURATION, depending on
wether the processor module has a valid configuration
Table 12: Operating System States, Possible User Interventions
i
The cycle time increases by the number of modules used in the system. This applies
irrespective of whether the modules are included or not in the configuration.
If additional base plates with 20 or more modules are connected during operation,
this can cause the watchdog time to be exceeded!
3.4.2 Behavior in the Event of Faults
If faults occur, the processor module enters the error stop state and tries to restart. It
performs a complete self-test which can also cause another error stop.
If the fault is still present, the module does not restart. Use the PADT to remove the cause
of the fault, e.g., by loading a new application.
Once the processor module has normally run for approximately one minute, an error stop is
considered again as first error stop.
3.5 Noise Blanking
This chapter describes how noise blanking of I/O modules operates in the HIMax system.
3.5.1 Impact of Noise Blanking
Noise blanking suppresses transient noise to increase the system availability. It ensures
that the system triggers a safety-related reaction to existing interferences within the
configured time.
Noise blanking can be activated for each individual I/O module. The default setting is
Activated for all I/O module types, except for counter modules.
If an interference is blanked out, the system automatically processes the last valid input and
output values instead of the currently disturbed values.
The time in which noise can be blanked out is limited by the safety time, the watchdog time
and the cycle time.