3. Operation
Fieldbus Communication
151
RCP6
3.8.3 Description of Functions
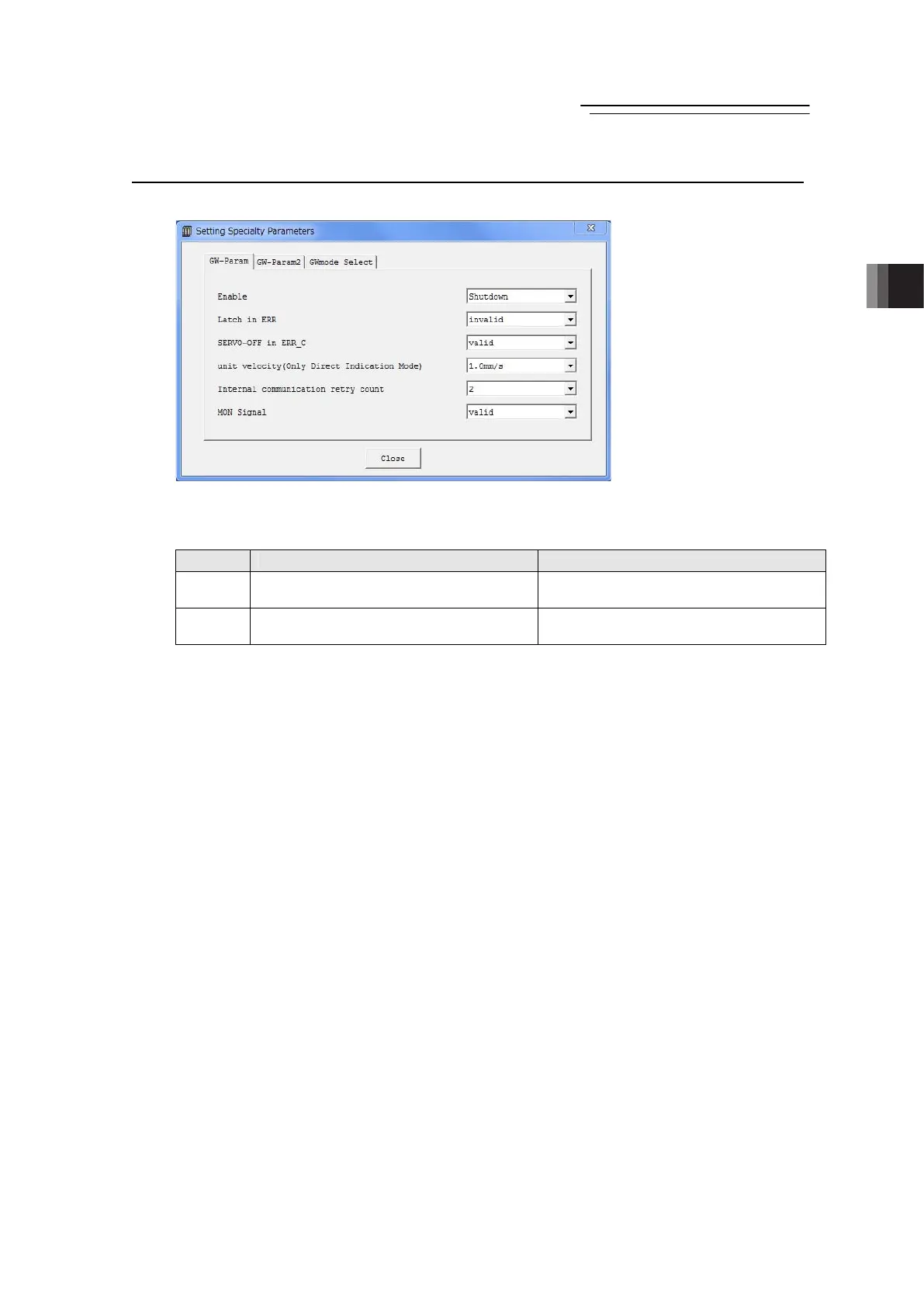
1) GW-Param
• Enable operation : Select the operation when enable input is detected.
Select either Shutdown Control or Servo Control.
• Latch in ERR : Select the operation at recovery after ERR_T or ERR_C occurred.
• SERVO-OFF in ERR_C : Select whether to turn the servo OFF on the
connected axes when ERR_C is occurred.
• Unit velocity (Only direct indication mode)
: Select the unit for speed from 1.0mm/s and
0.1mm/s.
• Internal communication retry count : Set the number of communication retries with the
connected axes in AUTO mode. (0 to 6)
• MON signal : Select whether to have MON Signal output valid
or invalid.
At Recovery after ERR_T Occurrence At Recovery after ERR_C Occurrence
Valid
Servo turns off. (Stops at position where
ERR_T occurred)
The condition of ERR_C occurred does
not get cancelled.
Invalid Servo remains on.
The condition of ERR_C occurred get
cancelled.

 Loading...
Loading...