5. Collision Detection Feature
Fieldbus Communication
173
RCP6
Chapter 5 Collision Detection Feature
This controller is equipped with a feature to stop immediately when the actuator is hit on an
object during operation.
Understand this chapter well to avoid any trouble in operation and safety.
Collision detection feature is a feature that stops the operation by generating an alarm and
turning OFF the servo when the command current exceeds the set value. The range for
detection also can be set.
Warning: This feature is a supportive feature to reduce the damage to a work piece in
case of an emergency.
It does not mean to compensate in any unexpected damage.
The setup of this feature is necessary to be adjusted to an expected collision,
and the optimum value differs depending on the system. Well confirm the
status before use.
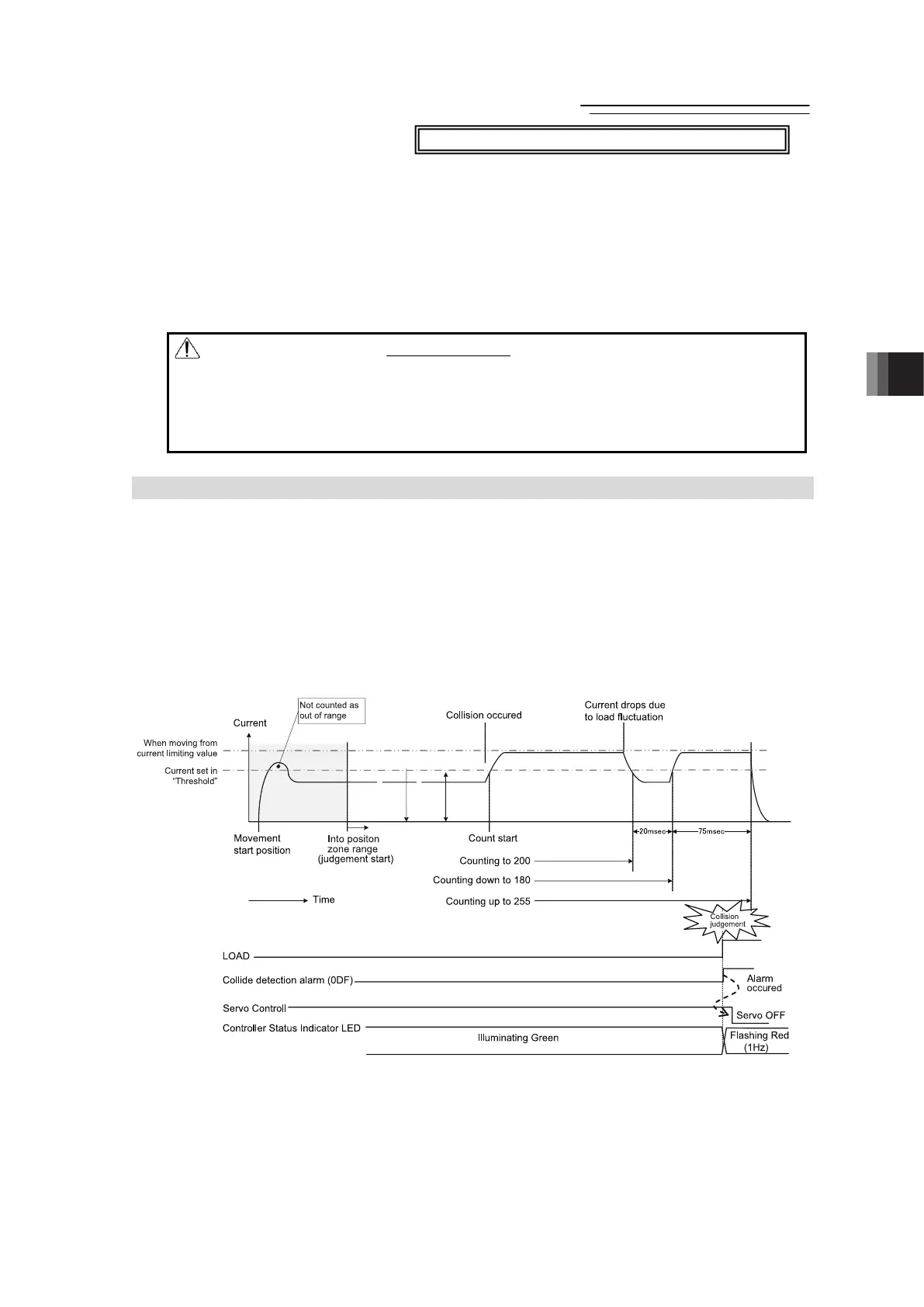
5.1 Collision Detection Judgement
Judgment is made as a collision when the current position is in the range of the position zone,
for longer than the time set in the parameter
*1
and the current has exceeded the threshold
*2
,
and it turns ON load output judgment (LOAD) signal
*3
and turns the servo OFF after generating
the collision detection alarm.
*1 Parameter No.50 Load output judgment time
*2 “Threshold” in the positioner table.
◎Example of judgement (when judgment time is 255ms)
Feature dedicated for RCP6S and RCM-P6PC

 Loading...
Loading...