8. Parameter
Fieldbus Communication
226
RCP6
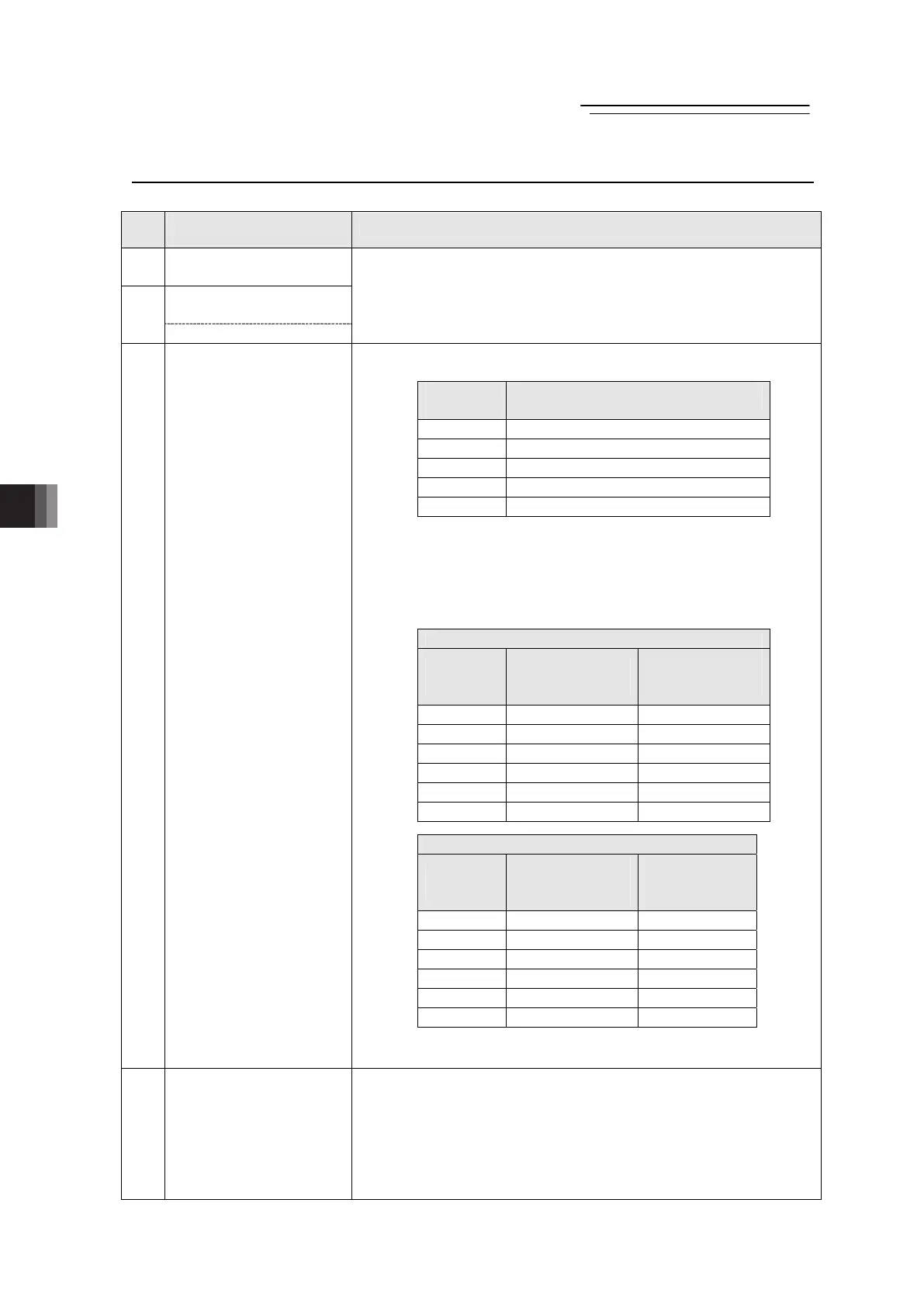
8.3.2 Adjustment of Brushless DC Electric Motor
No.
Situation that requires
adjustment
How to Adjust
1
Hunching occurs at
positioning stop
Fluctuation in speed
occur during operation
2
Speed is inaccurate
Set the parameter in the following steps, and check the operation.
If an improvement is confirmed in operation, finish the adjustment.
It is not necessary to proceed to the next step.
Procedure 1 :
Change Parameter No. 32 “Velocity Loop Integrated Gain”
Set the five types of values below in order, and check the operation.
Setting
Order
Velocity Loop Integrated Gain
Setting
1 411
2 592
3 925
4 1645
5 3700
Go onto Procedure 2 if there is no improvement in operation.
Procedure 2 : Change Parameter No. 31 “Velocity Loop
Proportional Gain” and Parameter No. 32 “Velocity
Loop Integrated Gain”
Set the six types of values below in order, and check the operation.
●Load of 0.2kg or less
Setting
Order
Velocity Loop
Proportional
Gain Setting
Velocity Loop
Integrated Gain
Setting
1 42 382
2 42 520
3 42 749
4 42 1171
5 42 2081
6 42 4683
●Load over 0.2kg
Setting
Order
Velocity Loop
Proportional
Gain Setting
Velocity Loop
Integrated
Gain Setting
1 32 231
2 32 315
3 32 453
4 32 708
5 32 1259
6 32 2833
Contact IAI if there is no improvement in operation.
3 Abnormal noise is
generated / Especially,
when stop or operation
in low speed (less than
20mm/sec),
comparatively high noise
is generated.
Change the values for Parameter No. 31 “Velocity Loop
Proportional Gain” and
Parameter No. 32 “Velocity Loop
Integrated Gain” to the following.
Speed loop proportional gain : 32
Speed loop integral gain : 231

 Loading...
Loading...