9. Troubleshooting
Fieldbus Communication
237
RCP6
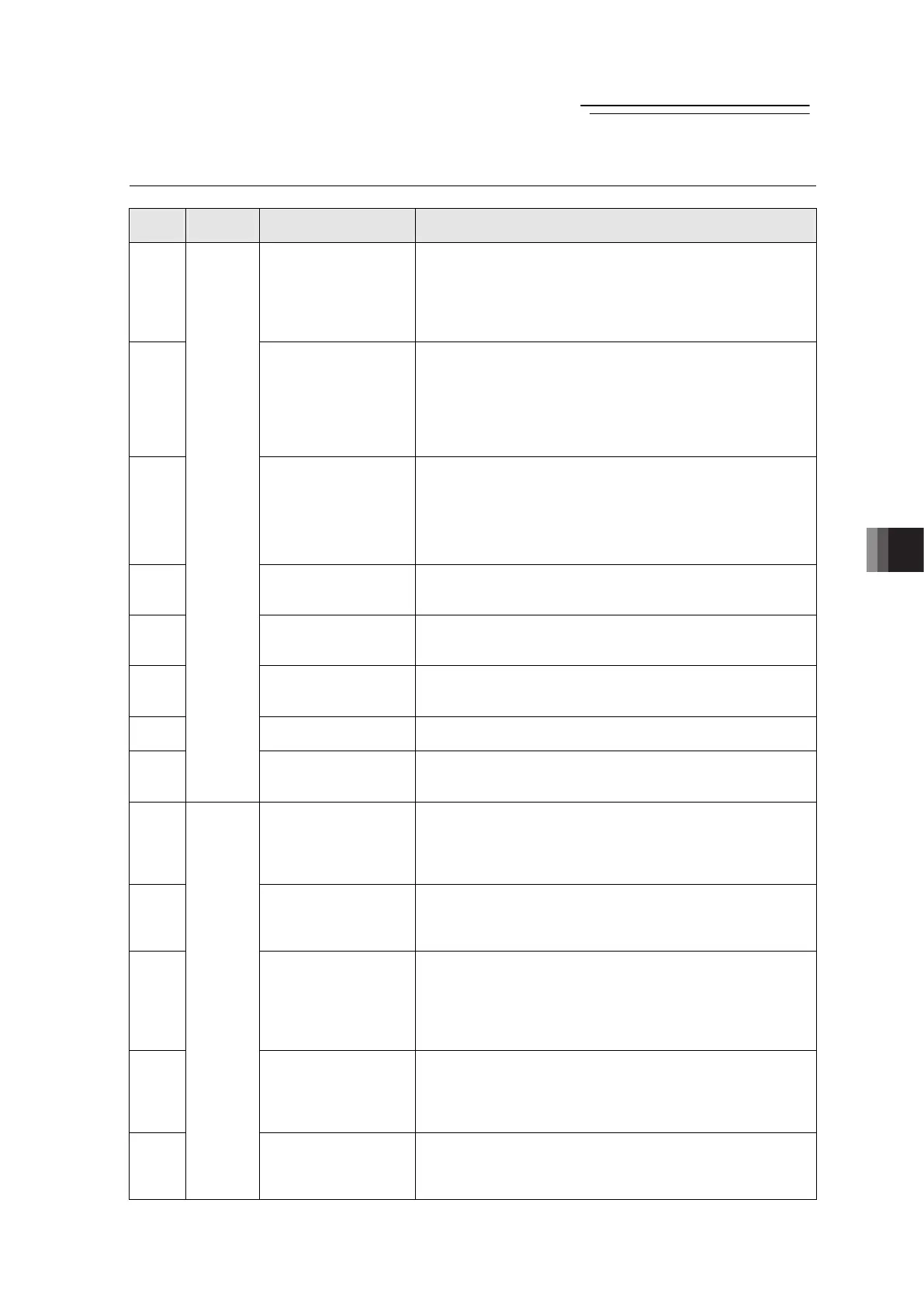
9.4.3 Alarm Codes for Driver Board
* In the alarm code list, description of P6PC shows RCM-P6PC, P6AC shows RCM-P6AC and P6DC shows RCM-P6DC.
Alarm
Code
Alarm
Level
Alarm Name Cause/Treatment
047 Deviation Overflow
Warning
Cause : The current operational condition or the sliding
resistance of the actuator is large, and there is a
concern of the deviation overflow being occurred.
Treatment : Reduce the acceleration setting.
Have a maintenance work conducted to supply
grease and so on.
048 Driver overload alarm Cause : The load current exceeded the value set in
Parameter No.143 “Overload Level Ratio”.
This alarm should turn on when the overload
current has risen from below exceeded the setting
and the alarm will be kept on until reset is held.
Treatment : Lower the setting of acceleration/deceleration. Also,
increase the frequency of pause.
049
For
RCP6S
and
P6PC
only
Collision alarm Cause : Motor current has reached the detection current set
in the collision detection feature.
Treatment : Remove the cause of collision.
If it is an unexpected detection, re-adjust the
collision detection feature.
[Refer to Chapter 5 Collision Detection Feature]
04E Exceeded movement
count threshold
Cause : The total number of the operation times exceeded
the value set in Parameter No.147 “Total Movement
Count Threshold”.
04F Exceeded operated
distance threshold
Cause : The total number of the operation distance
exceeded the value set in Parameter No.148 “Total
Operated Distance Threshold”.
05C Receiving timeout Cause : Valid data was not detected even after 5 seconds
has passed since the start (header) of Modbus
communication was detected.
05E Delimiter error packet
receive
Cause : Valid data cannot be detected with Modbus
communication, or abnormal data was received.
06B
Message
Maintenance
information data error
Cause : The maintenance information (total movement
count, total operated distance) is lost.
Treatment : Please contact IAI.
080 Move command in servo
OFF
Cause : A move command was issued when the servo is
OFF.
Treatment : Issue a movement command after confirming the
servo is ON (servo ON signal (SV) or position
complete signal (PEND) is ON).
082 Position command in
incomplete home return
Cause : A position move command was issued before home
return was completed.
Treatment : Issue a command after confirming that home return
has been completed (HEND) is ON.
083 Numerical command in
incomplete home return
Cause : An absolute position command was issued by
numerical specification before home return was
completed (direct command from Field Network).
Treatment : Issue a numeric specification after performing home
return operation and confirming the complete signal
(HEND).
084 Absolute position move
command when home
return is not yet
completed
Cause : A move command was issued when home return
was still in progress.
Treatment : Issue a movement command after performing home
return operation and confirming the complete signal
(HEND).
085
Operation
release
Position No. error during
movement
Cause : A non-existing (invalid) position number was
specified in the positioner mode.
Treatment : Check the position table again and indicate an
effective position number.

 Loading...
Loading...