9. Troubleshooting
Fieldbus Communication
236
RCP6
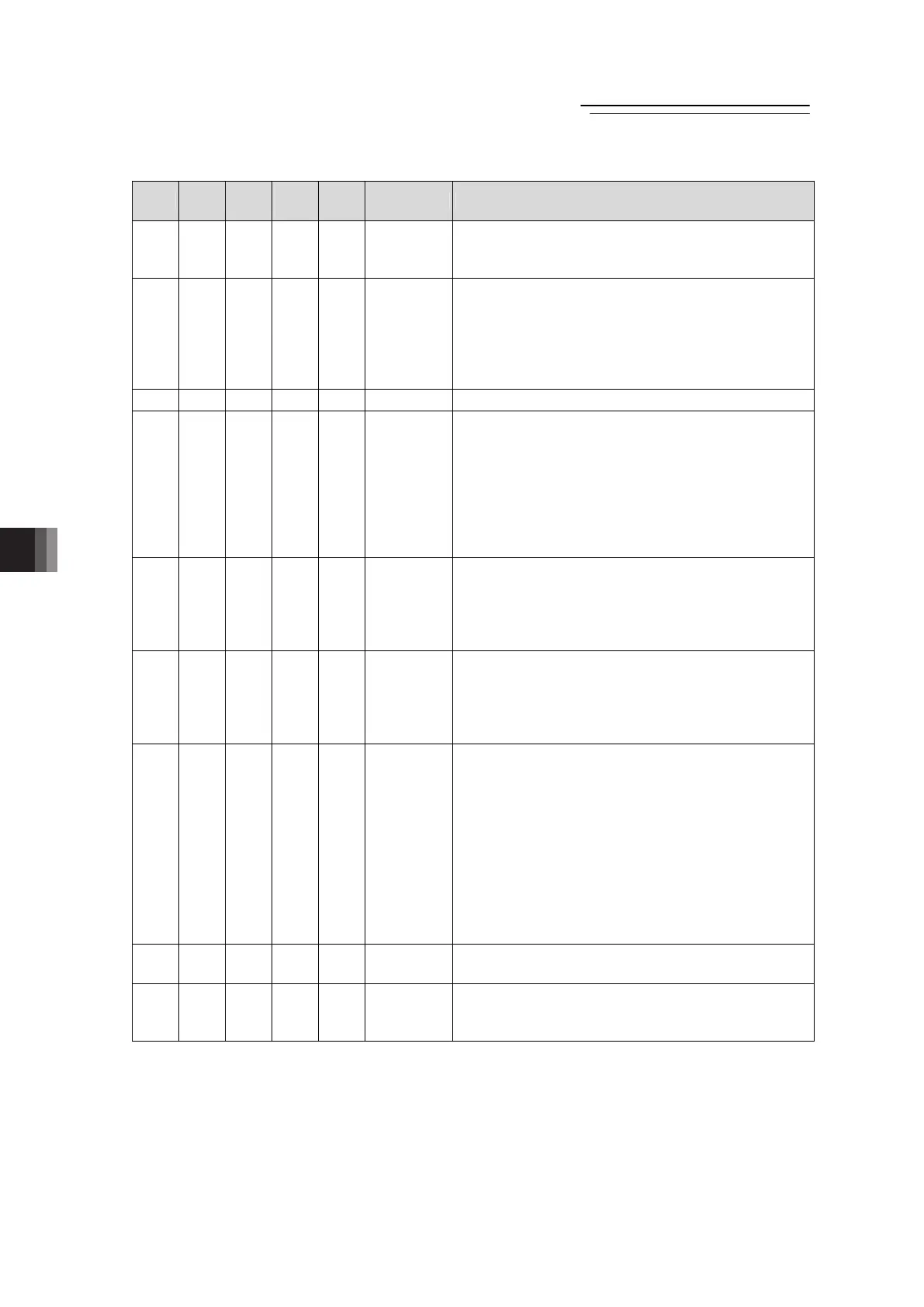
*ALM
ALM8
(PM8)
ALM4
(PM4)
ALM2
(PM2)
ALM1
(PM1)
Binary Code Description: Alarm code is shown in ( ).
z z { { z
6
Parameter data error (0A1)
Position data error (0A2)
Unsupported motor/encoder type (0A8)
z z { { {
7
Z-phase position error (0B5)
Z-phase detection time out (0B6)
Magnetic pole indeterminacy (0B7)
Excitement detection error (0B8)
Home sensor non-detection (0BA)
Home return timeout (0BE)
z { z z z
8 Actual speed excessive (0C0)
z { z z {
9
Overcurrent (0C8)
Overvoltage (0C9)
Overheat (0CA)
Current sensor offset adjustment error (0CB)
Control power supply voltage error (0CC)
Control power supply voltage drop (0CE)
Drive source error (0D4)
External Output Power Source Error (0DE)
z { z { {
11
Command counter overflow in Incomplete home
return (0D5)
Deviation overflow (0D8)
Software stroke limit exceeded (0D9)
Pressing motion range over error (0DC)
z { { z z
12
Electric angling mismatching (0B4)
Servo error (0C1)
Illegal control system transition command (0C5)
Motor power source voltage excessive (0D2)
Overload (0E0)
z { { z {
13
Encoder send error (0E4)
Encoder receipt error (0E5)
Encoder Counter Error (0E6)
A-, B- and Z-phase wire breaking (0E7)
A and B-phase wire breaking (0E8)
Battery-less ABS error (0EB)
PS-phase wire breaking (0EC)
Absolute encoder error detection 1 (0ED)
Absolute encoder error detection 2 (0EE)
Absolute encoder error detection 3 (0EF)
Driver logic error (0F0)
z { { { z
14
CPU error (0FA)
Logic error (0FC)
z { { { {
15
Nonvolatile memory write verify error (0F5)
Nonvolatile memory write timeout (0F6)
Nonvolatile memory data destroyed (0F8)
(Note) *ALM Signal is an active low signal. It is ON when the power is applied to the controller, and
turns OFF when the signal is output.

 Loading...
Loading...