150
Note:
1. Set the motor parameters according to the name plate of the motor.
2. During the motor autotune, de-couple the motor form the load if rotation autotune is selected to
make the motor is in a static and empty state, otherwise the result of autotune is incorrect. The
asynchronous motors can autotune the parameters of P02.06~P02.10.
3. During the motor autotune 1, do not to de-couple the motor form the load if static autotune is
selected. Because only some parameters of the motor are involved, the control performance is not
as better as the rotation autotune. The asynchronous motors can autotune the parameters of
P02.06~P02.10.
4. During the motor autotune 2, do not to de-couple the motor form the load if static autotune is
selected. Because only some parameters of the motor are involved, the control performance is not
as better as the rotation autotune. The asynchronous motors can autotune the parameters of
P02.06~P02.08. It is suitable in the cases which SVPWM control is applied.
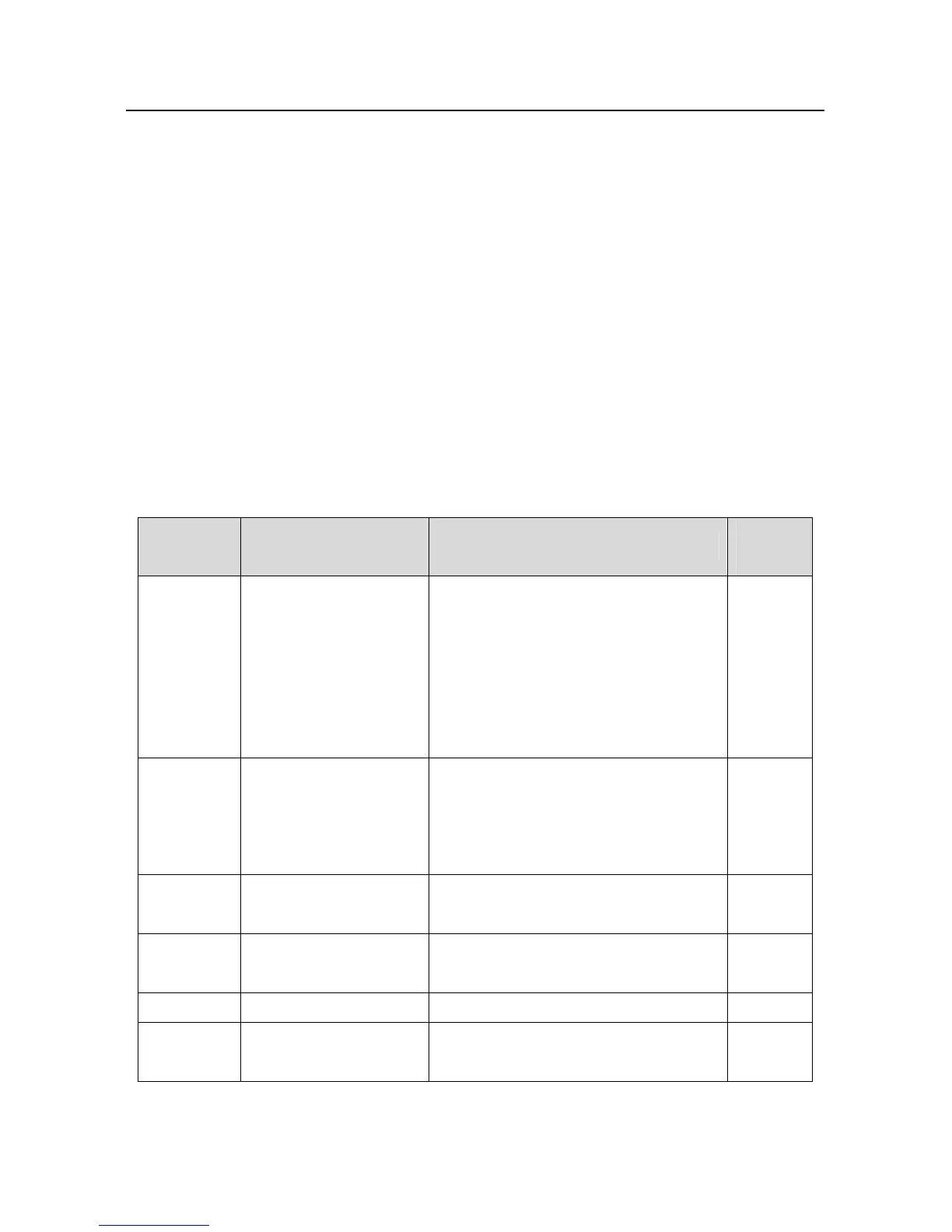
Relative parameters list:
Function
code
Name Detailed instruction of parameters
Default
value
P00.01 Run command channel
0:Keypad running command
channel(LED off)
1:Terminal running command channel
(LED flickering)
2:Communication running command
channel (LED on)
0
P00.15
Motor parameter
autotuning
0:No operation
1:Rotation autotuning
2:Static autotuning 1
3:Static autotuning 2
0
P00.17 Inverter type
0:G
1:P
0
P02.01 Rated power of AM 1

 Loading...
Loading...