Goodrive270 series VFD for fan and pump Communication
-278-
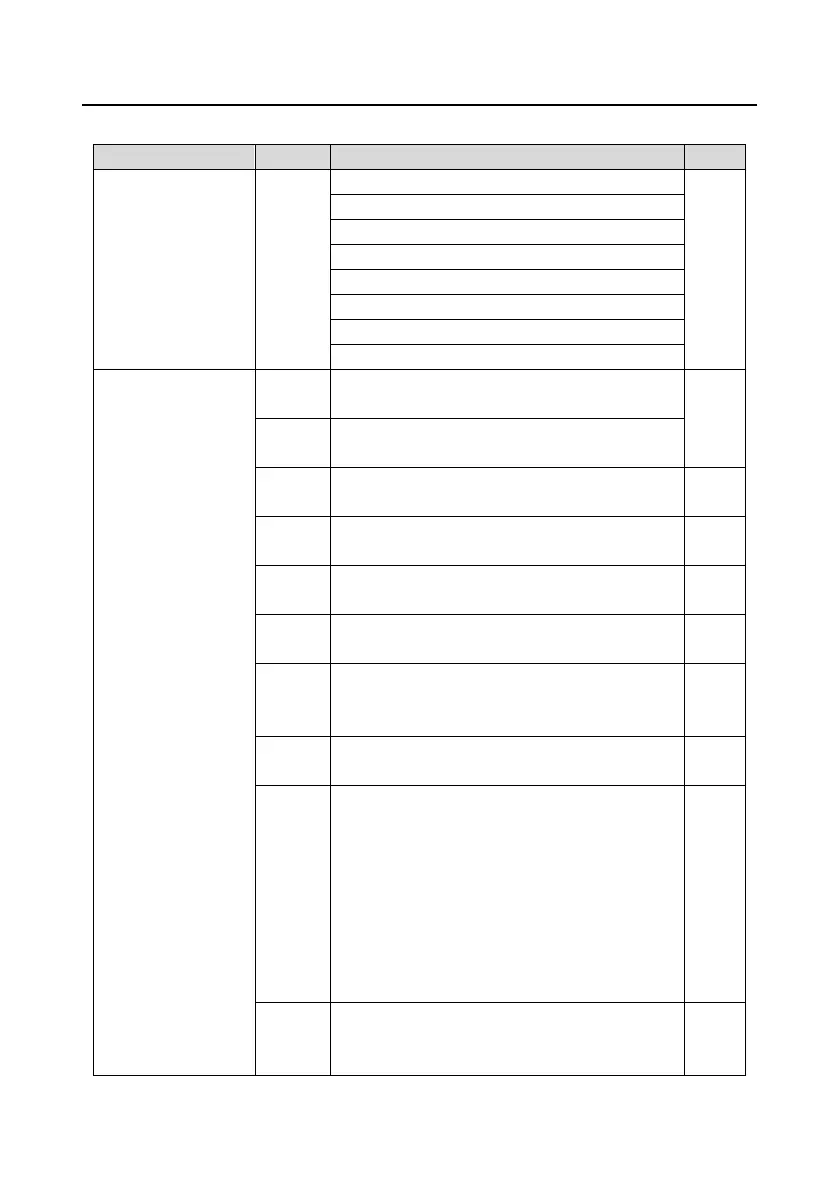
Table 9-1 Addresses of other function parameters
Communication-based
control command
2000H
R/W
Communication-based
setting address
2001H
Communication-based frequency setting (0±Fmax;
R/W
2002H
PID reference (0±1000, in which 1000 corresponds
2003H
PID feedback (0±1000, in which 1000 corresponds
R/W
2004H
Torque setting (-3000±3000, in which 1000
corresponds to 100.0% of the motor rated current)
R/W
2005H
Upper limit setting of forward running frequency (0±
R/W
2006H
Upper limit setting of reverse running frequency (0±
R/W
2007H
Electromotive torque upper limit (0±3000, in which
1000 corresponds to 100.0% of the VFD rated
R/W
2008H
Braking torque upper limit (0±3000, in which 1000
corresponds to 100.0% of the motor rated current)
R/W
2009H
Special CW
Bit1±0=00: Motor 1 =01: Motor 2
Bit2=1 Enable speed/torque control switchover
=0: Disable speed/torque control switchover
Bit3=1 Clear electricity consumption data
=0: Keep electricity consumption data
Bit4=1 Enable pre-excitation =0: Disable
pre-excitation
Bit5=1 Enable DC braking =0: Disable DC braking
R/W
200AH
Virtual input terminal command (0x000±0x3FF)
(Corresponding to
S8/S7/S6/S5/Reserved/HDIA/S4/ S3/ S2/S1)
R/W
 Loading...
Loading...