Goodrive30 Series VFD Communication protocol
-138-
In the process of multiplying a non-integer by a multiple to obtain an integer, the multiple is
referred to as a fieldbus scale.
The fieldbus scale depends on the number of decimals in the value specified in "Description"
or "Default" of the function parameter list. If there are n decimals in the value (for example,
n=1), the fieldbus scale m is the nth-power of 10. Take the following table as an example, m is
10.
Description Default Modify
0.0–3600.0s (valid when P01.19 is 2) 0.0s ○
0: Disable
1: Enable
0 ○
The value specified in "Setting range" or "Default" contains one decimal, so the fieldbus scale
is 10. If the value received by the upper computer is 50, the value of "Wake-up-from-sleep
delay" of the VFD is 5.0 (5.0=50/10).
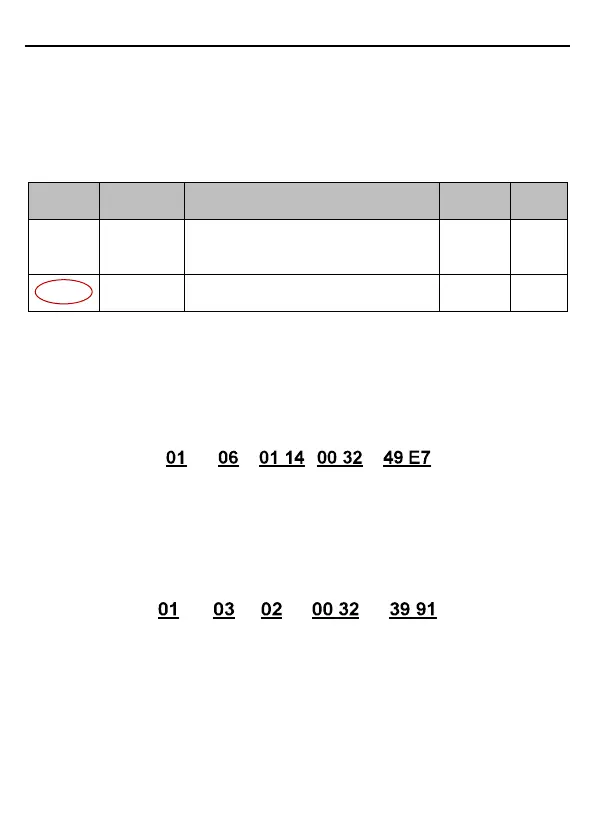
To set the "Wake-up-from-sleep delay" to 5.0s through Modbus communication, you need first
to multiply 5.0 by 10 according to the scale to obtain an integer 50, that is, 32H in the
hexadecimal form, and then transmit the following write command:
VFD
address
Write
command
Parameter
address
Data number CRC check
After receiving the command, the VFD converts 50 into 5.0 based on the fieldbus scale, and
then sets "Wake-up-from-sleep delay" to 5.0s.
For another example, after the upper computer transmits the "Wake-up-from-sleep delay"
parameter read command, the master receives the following response from the VFD:
VFD
address
Read
command
Parameter
data
CRC check 2-byte
data
The parameter data is 0032H, that is, 50, so 5.0 is obtained based on the fieldbus scale
(50/10=5.0). In this case, the master identifies that the "Wake-up-from-sleep delay" is 5.0s.
7.4.4 Error message response
Operation errors may occur in communication-based control. For example, some parameters
can only be read, but a write command is transmitted. In this case, the VFD returns an error
message response. Error message responses are sent from the VFD to the master. The

 Loading...
Loading...







