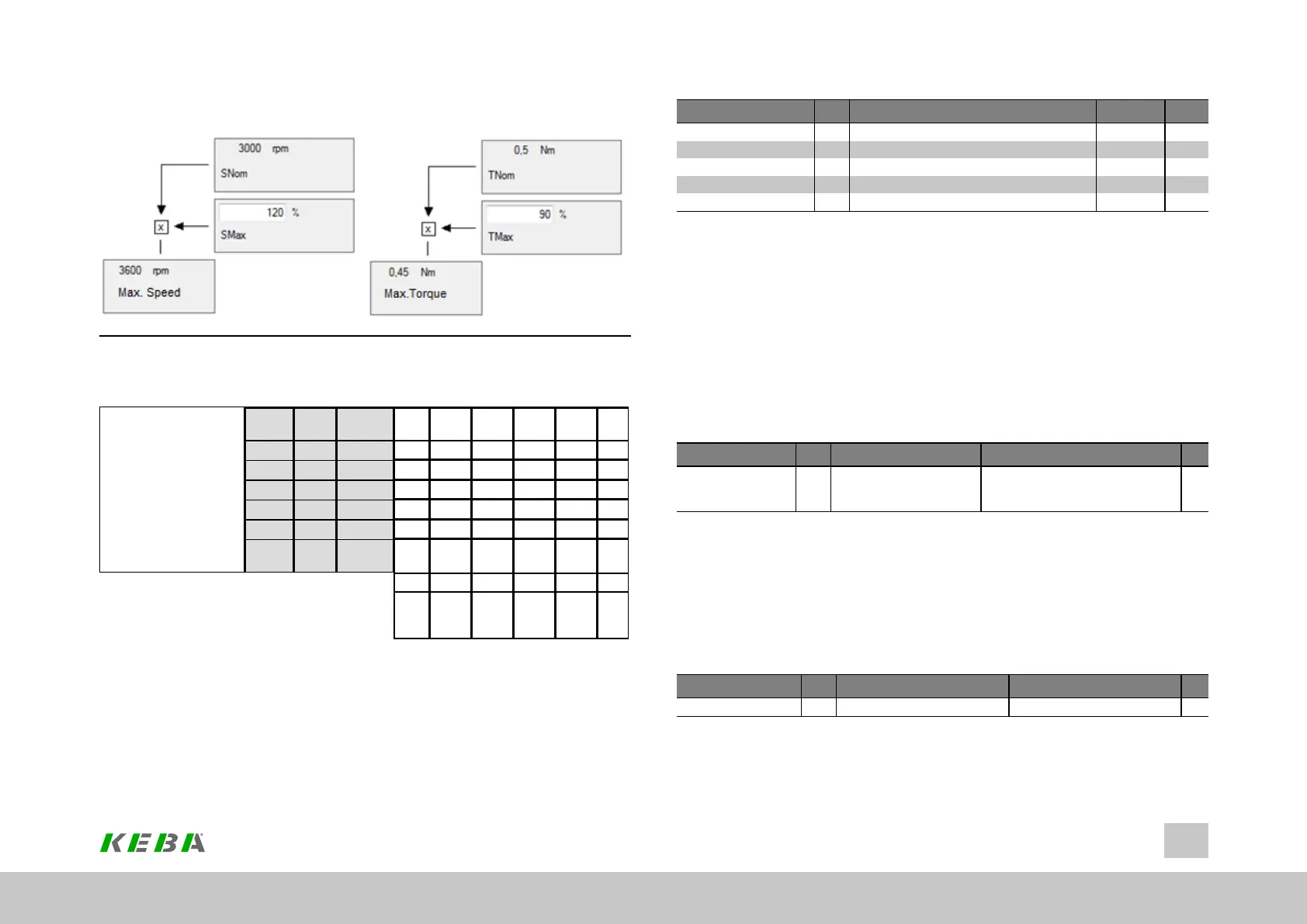
Example:
Image 7.37: Example
The possible performance maps for the q and d current reference result from this:
Torque
0.45 Nm 0.45
Nm
127
... ... ...
... ... ...
... 0 ...
... ... ...
... ... ...
0 -0.45
Nm (*)
0
0 1 2 3 ... 127
0
rpm
(**)
... ... ... ... 3600
rpm
Speed
(*) Map values with negative torques are allowed (large table).
ID No.: 0842.26B.5-01Date: 09.2020
ServoOne- Device Help
154
7 Control
ID Index Name / Setting Description Unit
P1966 CON_FM_LUT_Para2
P1966 0 LUT:Tabspeedmaximum 3600 rpm
P1966 1 LUT:Tabspeedminimum Always0 (**) rpm
P1966 2 LUT:Tabtorquemaximum 0.45 Nm
P1966 3 LUT:Tabtorqueminimum -0.45 (*) Nm
Table 7.31: Size of the map for the size of the table
(**) Map values with a negative torque are not supported. (The range of negative
torques is mapped on the range of the positive torques by means of sign
manipulation.)
7.7.5.1Internalcalculationofthesmalltable
Select: Internal calculation of the small table
Activate small LUT: P435[0] - CON_FM_FWMode = REL(3)
ID Index Name / Setting Description Unit
P435 0
CON_FM_FWMode
3: Internal calculation of the small
table
Table 7.32: Mode selection: Internal calculation of the small table
Performing initialization
Afterwards, an initialization must be performed or the controller must be restarted so
that the mode selection takes effect.
Parameter P 149[0] - MPRO_DRVCOM_Init = START(1).
ID Index Name / Setting Description Unit
P149 MPRO_DRVCOM_Init 1:Startre-initialization
Table 7.33: P 149, perform re-initialization
 Loading...
Loading...


