AKD CANopen | 8 Appendix
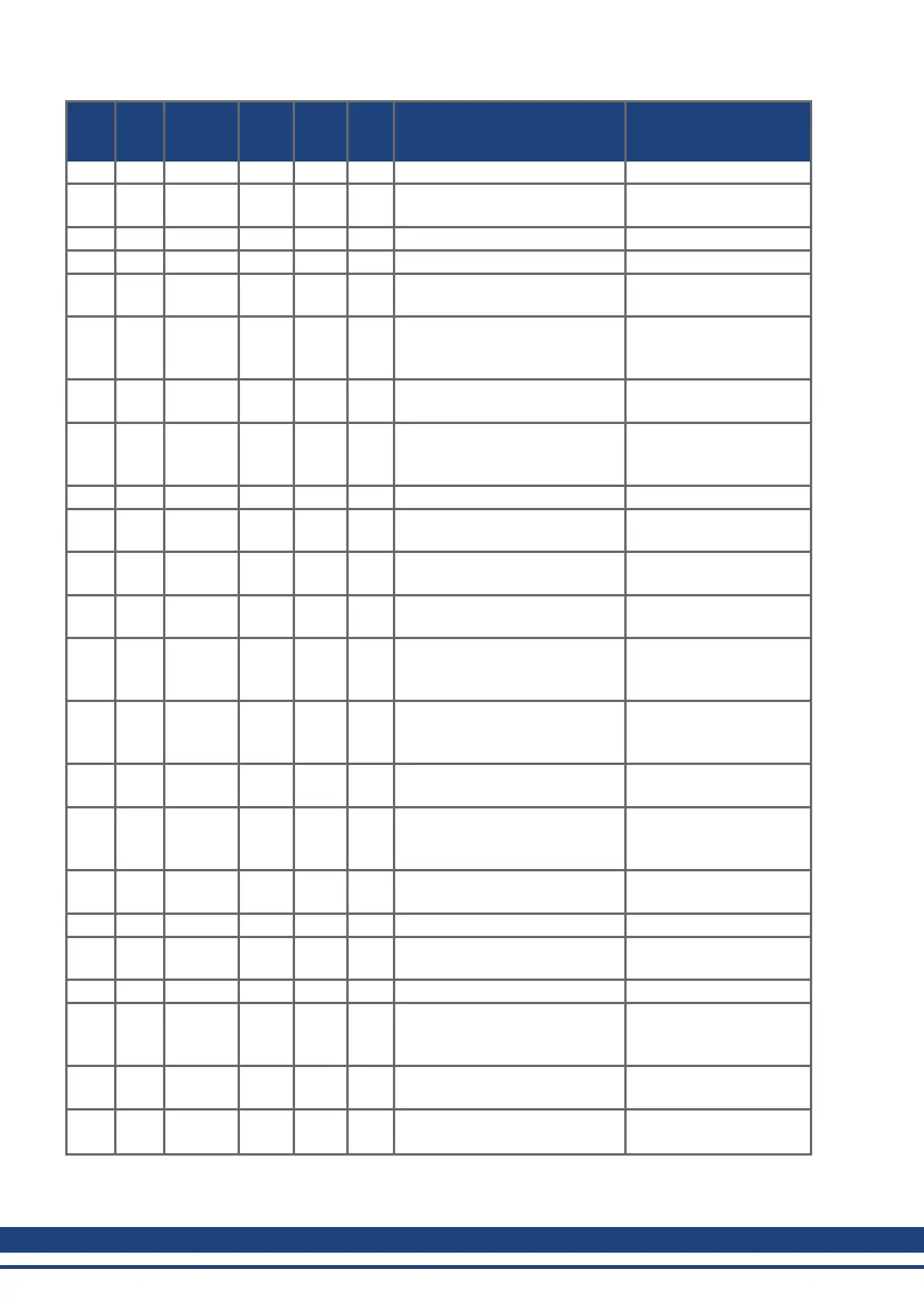
Index Sub-
index
DataType Float
Scal-
ing
Acces-
s
PDO
map-
p.
Description ASCII object
5060h 0 UINT32 RW no Sets the fault relay mode. DOUT.RELAYMODE
5080h 0 UINT32 RW no Default state of the software ena-
ble.
DRV.ENDEFAULT
5083h 0 UINT32 RW no Continuous rated current value. DRV.ICONT
5084h 0 UINT32 RW no Peak rated current value. DRV.IPEAK
5085h 0 UINT32 RW no Current that will be used during
the DRV.ZERO procedure.
DRV.IZERO
508Ch 0 UINT32 RW no Number of Biss Sensor (Position)
Bits for the BiSS Mode C encoder
in use.
FB1.BISSBITS
508Fh 0 UINT32 RW no Initial feedback value as signed or
unsigned.
FB1.INITSIGNED
5096h 0 UINT32 RW no Current value used during the
phase finding procedure
(PFB.PFIND=1)
FB1.PFINDCMDU
5097h 0 UINT32 RW no Number of feedback poles. FB1.POLES
5099h 0 UINT32 RW no Resolver nominal transformation
ratio.
FB1.RESKTR
509Ah 0 UINT32 RW no Electrical degrees of phase lag in
the resolver.
FB1.RESREFPHASE
509Ch 0 UINT32 RW no Controls tracking calibration algo-
rithm.
FB1.TRACKINGCAL
50B1h 0 UINT32 RW no Number of successful syn-
chronized cycles needed to lock
the PLL.
FBUS.PLLTHRESH
50BB-
h
0 UINT32 RW no Denominator of the electronic
gearing ratio; active in opmode 2
(position) only.
GEAR.IN
50BC-
h
0 UINT32 RW no Electronic gearing mode; active in
opmode 2 (position) only.
GEAR.MODE
50BE-
h
0 UINT32 RW no Numerator of the electronic gear-
ing ratio; active in opmode 2 (posi-
tion) only.
GEAR.OUT
50E2h 0 UINT32 RW no Current loops fieldbus injected
feed-forward gain
IL.KBUSFF
50FBh 0 UINT32 RW no Motor pitch. MOTOR.PITCH
50FEh 0 UINT32 RW no Type of thermal resistor inside the
motor.
MOTOR.RTYPE
5104h 0 UINT32 RW no Motor type. MOTOR.TYPE
510Eh 0 UINT32 RW no Motion task to be triggered after
an emergency stop procedure;
active in opmode 2 (position) only.
MT.EMERGMT
5121h 0 UINT32 RW no Type of following error warning
and fault usage.
PL.ERRMODE
5128h 0 UINT32 RW no Feedback source for the position
loop.
PL.FBSOURCE
132 Kollmorgen™ | November 2012

 Loading...
Loading...







