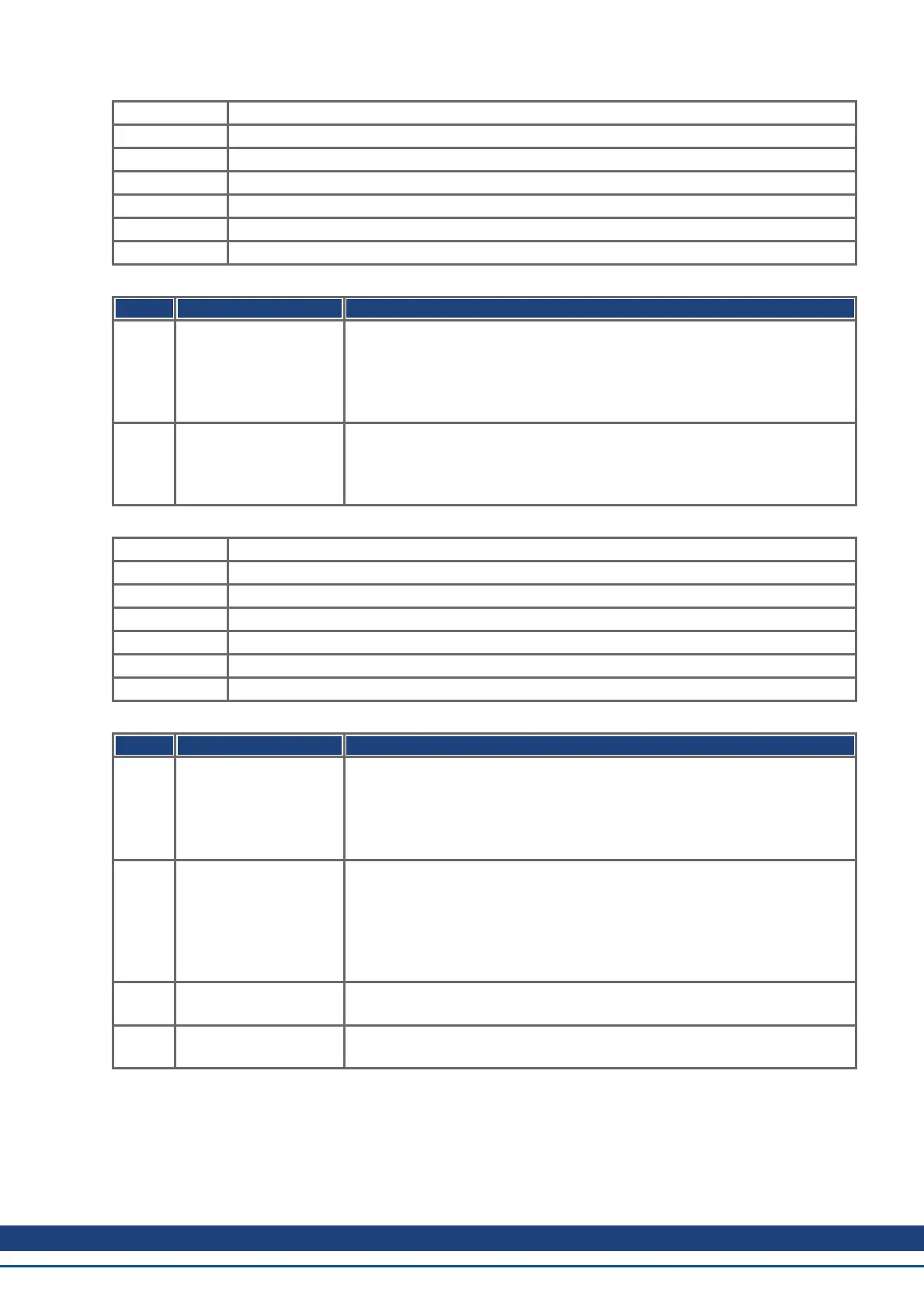
Subindex 1
Name Brake Control Command
Category optional
Access R/W
PDO Mapping possible
Value Range UNSIGNED16
Default Value 0
With subindex 1 the brake is controlled. Bit definition:
Bit Name Description
0 Enable fieldbus control 0 - brake is not controlled via this object
1 - enable fieldbus control via this object. This function works edge triggered,
i.e. this bit has to have a 0 -> 1 transition to activate the brake control func-
tionality. After a fault the functionality is reset and has to be activated again.
The activation can be controlled by subindex 2 bit 0.
1 Brake Command This command bit is only active, if the functionality was activated via bit 0.
The function is as follows:
0 - apply the brake
1 - release the brake
Subindex 2
Name Brake Status Response
Category optional
Access R/O
PDO Mapping possible
Value Range UNSIGNED16
Default Value 0
With subindex 2 the brake status can be checked. Bit definition:
Bit Name Description
0 Fieldbus control Status 0 - brake control via 0x345A is disabled or not possible due to drive failure.
1 - enable fieldbus control via this object. This function works edge triggered,
i.e. this bit has to have a 0 -> 1 transition to activate the brake control func-
tionality. After a fault the functionality is reset and has to be activated again.
The activation can be controlled by subindex 2 bit 0.
1 Brake Status 0 - apply the brake
1 - release the brake
Note: When the brake is applied or released, there is a time delay
MOTOR.TBRAKEAPP or MOTOR.TBRAKEREL, after the receipt of the
command before this status bit changes. The status is always reported: it is
not affected by fieldbus control.
2 STO Status 0 - STO is not active (drive may be enabled)
1 - STO is active (drive can not be enabled)
3 HW Enable Status 0 - HW enable is disabled, drive function can not be enabled
1 - HW enable is enabled, drive function can be enabled
AKD CANopen | 7 CANopen Drive Profile
Kollmorgen™ | November 2012 67