Chapter 7 EtherCAT Communication
Following error actual value
7.4.5.2 Control word and status word
The control word in Cyclic Synchronous Position Mode (CSP) is the same as the standard definition.
Status word in Cyclic Synchronous Position Mode (CSP) :
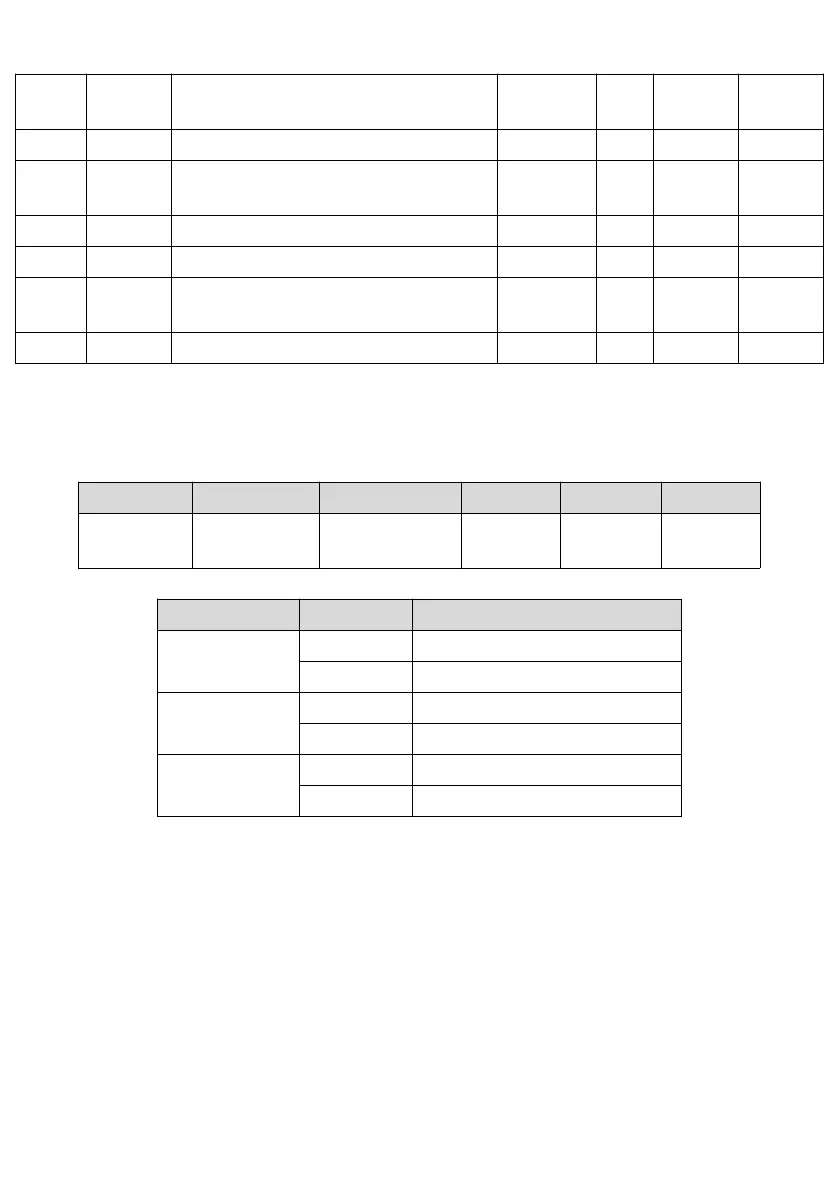
Description of status word bits in Cyclic Synchronous Position Mode (CSP) :
Target position not reached
Position instruction not followed
Position instruction followed
There is position deviation
7.4.5.3 Function description
• Running mode: Set 6060h=8;
• Target position: Use 607Ah to set the target position of the user unit, if necessary, set the position factor 6093h;
• Running enable: Enable the drive to run by the control word 6040h;
• Speed limit setting: Select the speed limit channel according to the function code object dictionary
2007.0Ah(P07.09 forward speed limit channel) and 2007.0Ch(P07.11 reverse speed limit channel), the default
bus speed limiting, using the maximum profile speed 607Fh and the maximum motor speed 6080h setting, or set
the internal speed limiting channel, then the speed limit is set according to the function code object dictionary
2007.0Bh(P07.10 forward speed limit) and 2007.0Dh(P07.12 reverse speed limit).
 Loading...
Loading...