Chapter 7 EtherCAT Communication
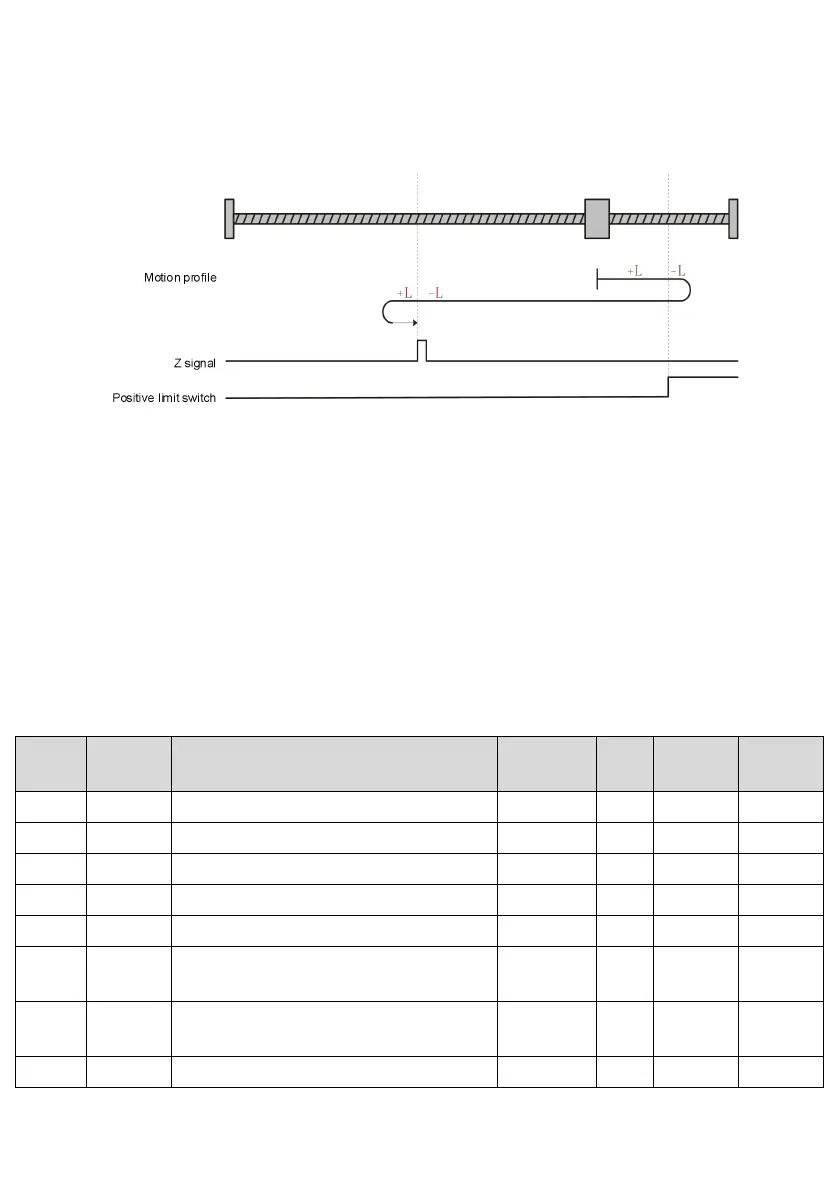
When there is no Z signal between the current position of the motor and the positive limit switch, forward low
speed returns to home, after encountering the rising edge of the positive limit switch, it runs at a low-speed in the
reverse direction. After encountering the falling edge of the Z signal, it will find the Z signal at a forward low speed
and stop.
0x6098 = 35
Take the current position as the home
7.4.5 Cyclic Synchronous Position Mode
The principle of the Cyclic Synchronous Position Mode is similar to that of the interpolated position mode. In this
mode, the master station completes the position command planning, and sends the planned target position to the
slave station drive in a periodic synchronous manner. In this mode, the target position object is 607Ah.
The Cyclic Synchronous Position Mode (CSP) supports only absolute position instructions, and the M5-N
supports only linear interpolation.
7.4.5.1 Common object
The following table lists the objects related to this mode.
Modes of operation display
Following error window time
 Loading...
Loading...