Chapter 7 EtherCAT Communication
bus speed limiting, using the maximum profile speed 607Fh and the maximum motor speed 6080h setting, or set
the internal speed limiting channel, then the speed limit is set according to the function code object dictionary
2007.0Bh(P07.10 forward speed limit) and 2007.0Dh(P07.12 reverse speed limit).
• Torque limiting setting: Select the torque limiting channel according to the function code object dictionary
2006.0Dh(P06.12 positive torque limiting channel) and 2006.0Eh(P06.13 negative torque limiting channel), the
default bus torque limiting channel, use the maximum torque 6072h, positive torque limiting 60E0h, negative
torque limiting 60E1h smaller value to set the positive and negative torque limiting value, or set the internal torque
limiting channel, then the torque limiting is set according to the function code object dictionary 2006.0Fh(P06.14
positive torque limit value) and 2006.10h(P06.15 reverse torque limit value).
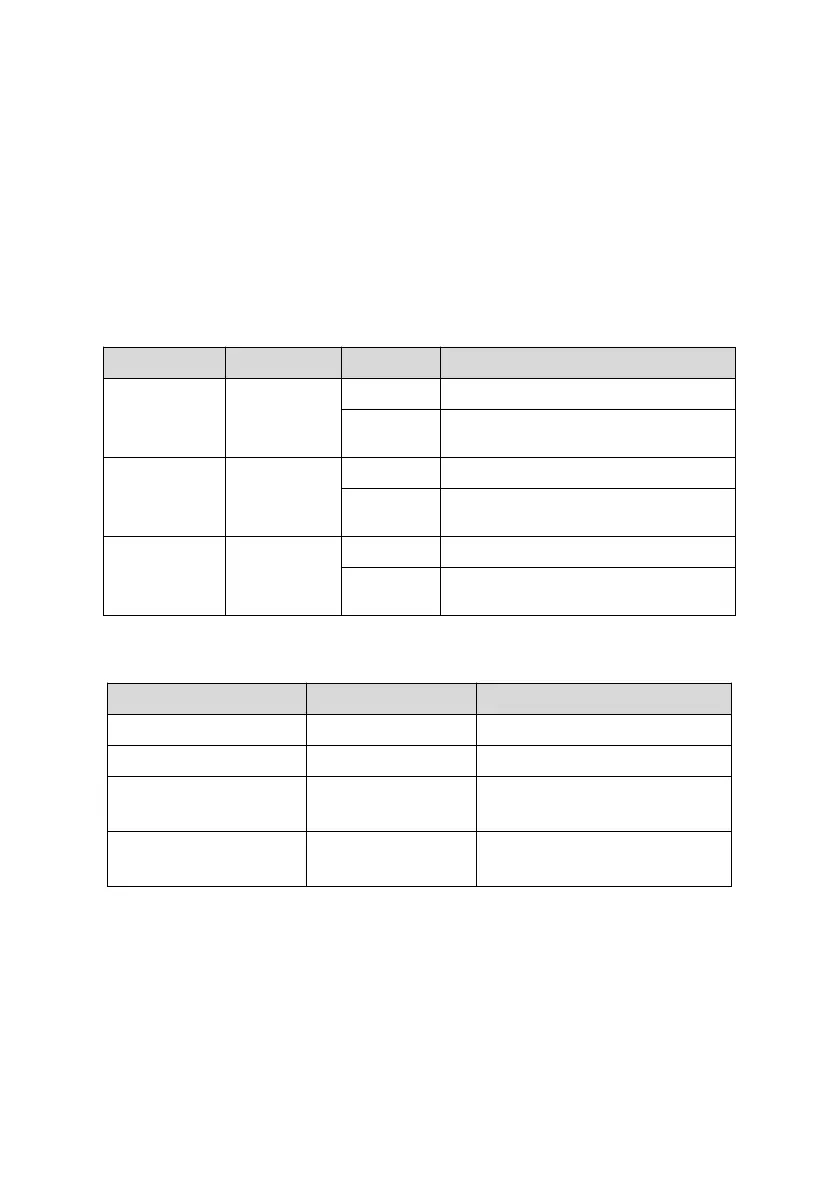
• Instruction polarity 0x607E: Torque, speed, position instruction logic is set according to the bit corresponding to
the object dictionary 0x607E;
Torque
instruction
polarity
Torque instruction positive logic
Torque instruction inverse logic
Speed instruction positive logic
Speed instruction inverse logic
Position
instruction
polarity
Position instruction positive logic
Position instruction inverse logic
7.4.6.4 Basic configuration
The following table describes the basic object configurations in Cyclic Synchronous Velocity Mode (CSV).
Optional, you can configure it as an SDO
parameter.
7.4.7 Cyclic Synchronous Torque Mode
In this mode, the master station periodically synchronizes the calculated target torque to the slave station drive,
and the slave station drive executes the target torque given by the master station. The interpolation period is the
same as the synchronization signal period.
 Loading...
Loading...