Chapter 7 EtherCAT Communication
7.4.7.1 Common object
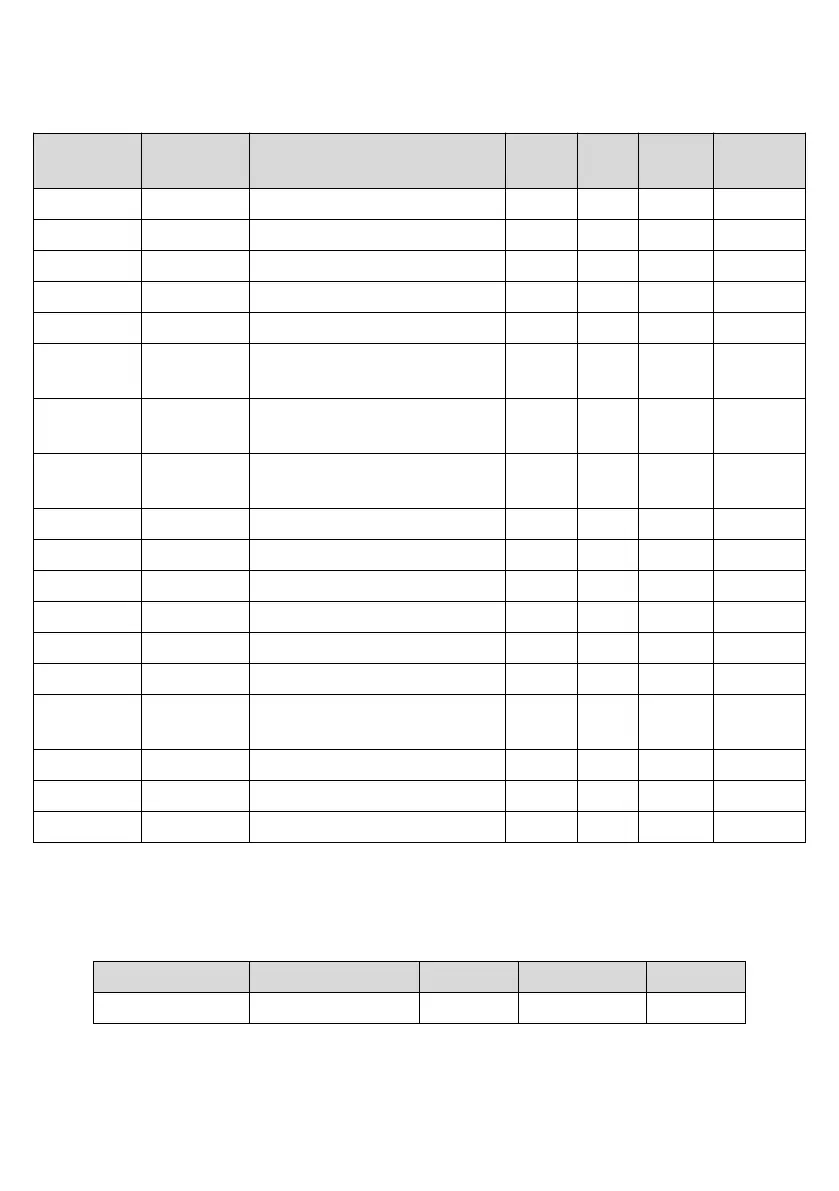
The following table lists the objects related to this mode.
Modes of operation display
7.4.7.2 Control word and status word
The control word under Cyclic Synchronous Torque Mode (CST) is the same as the standard definition.
Status word in Cyclic Synchronous Torque Mode (CST) :
Description of status word bits in Cyclic Synchronous Torque Mode (CST) :
 Loading...
Loading...