Chapter 7 EtherCAT Communication
After the drive is powered on, the drive is initialized and goes to the SWITCH_ON_DISABLED state. In this case,
you can configure the working mode of the drive while the main power is still off.
After State Transition 2, 3, and 4, enter OPERATION ENABLE. At this point, the main power is on, and the drive
controls the motor according to the configured working mode. Therefore, this state must be preceded by
confirmation that the drive parameters and corresponding input values are correctly configured to zero.
State Transition 9 is complete, turn off the main power of the circuit.
If the drive alarms, the drive state enters the "Fault" state. All states enter Fault after an alarm.
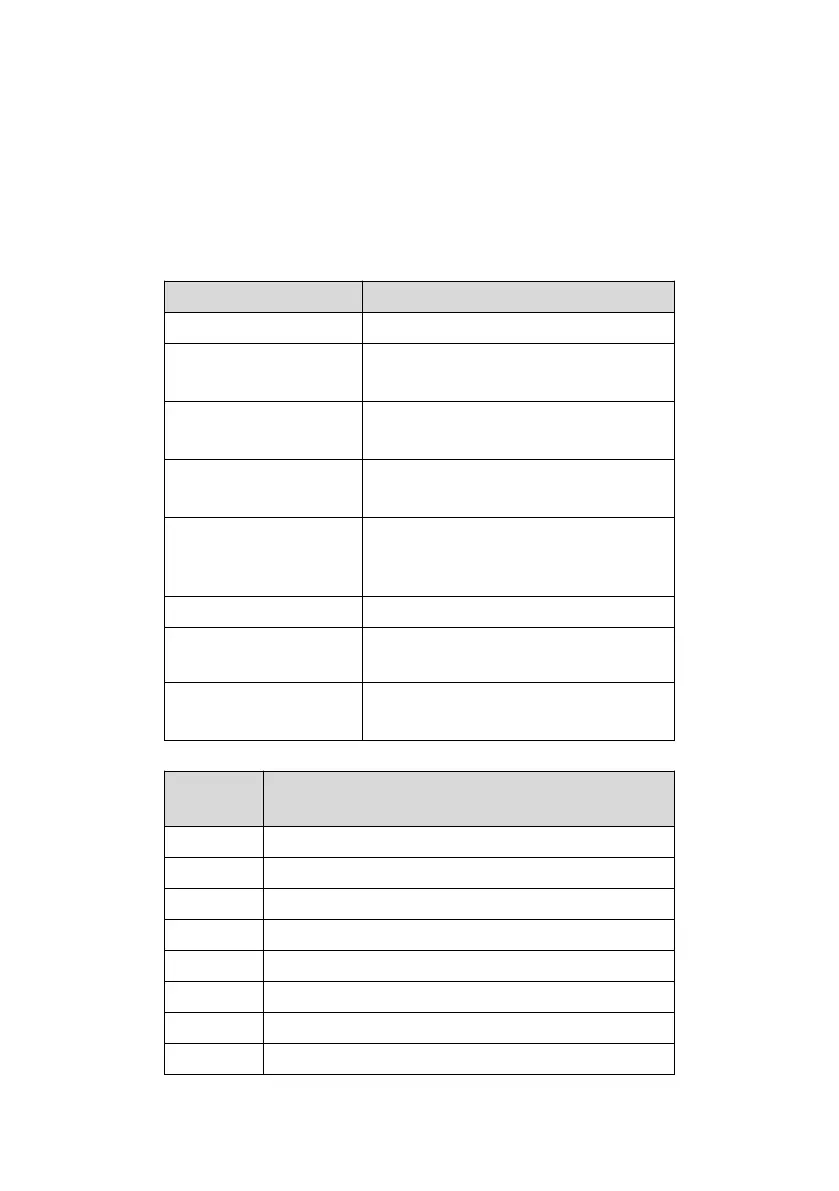
The following table describes the status and meaning of the drive.
The drive is in the process of initializing.
Drive initialization is complete.
Drive parameters are configurable.
The drive can be powered on;
Drive parameters are configurable.
The drive is powered on.
Drive parameters are configurable.
Drive is fault-free.
The drive is enabled.
Drive setting parameters are valid.
The drive detects that a fault has occurred and
performs the fault stop procedure.
The drive fault occurs and the fault stop ends.
The drive function is disabled.
The following table describes the drive status switching.
The state switch is carried out automatically after the drive is reset.
The state switch is carried out automatically after the drive is reset.
Received Shut Down command
Received Switch On command
Received Enable Operation command
Received Disable Operation command
Received Shut Down command
Received Quick Stop and Disable Voltage command
 Loading...
Loading...