226
8 CONTROL SUB FUNCTIONS
8.3 Functions for Compensating the Control
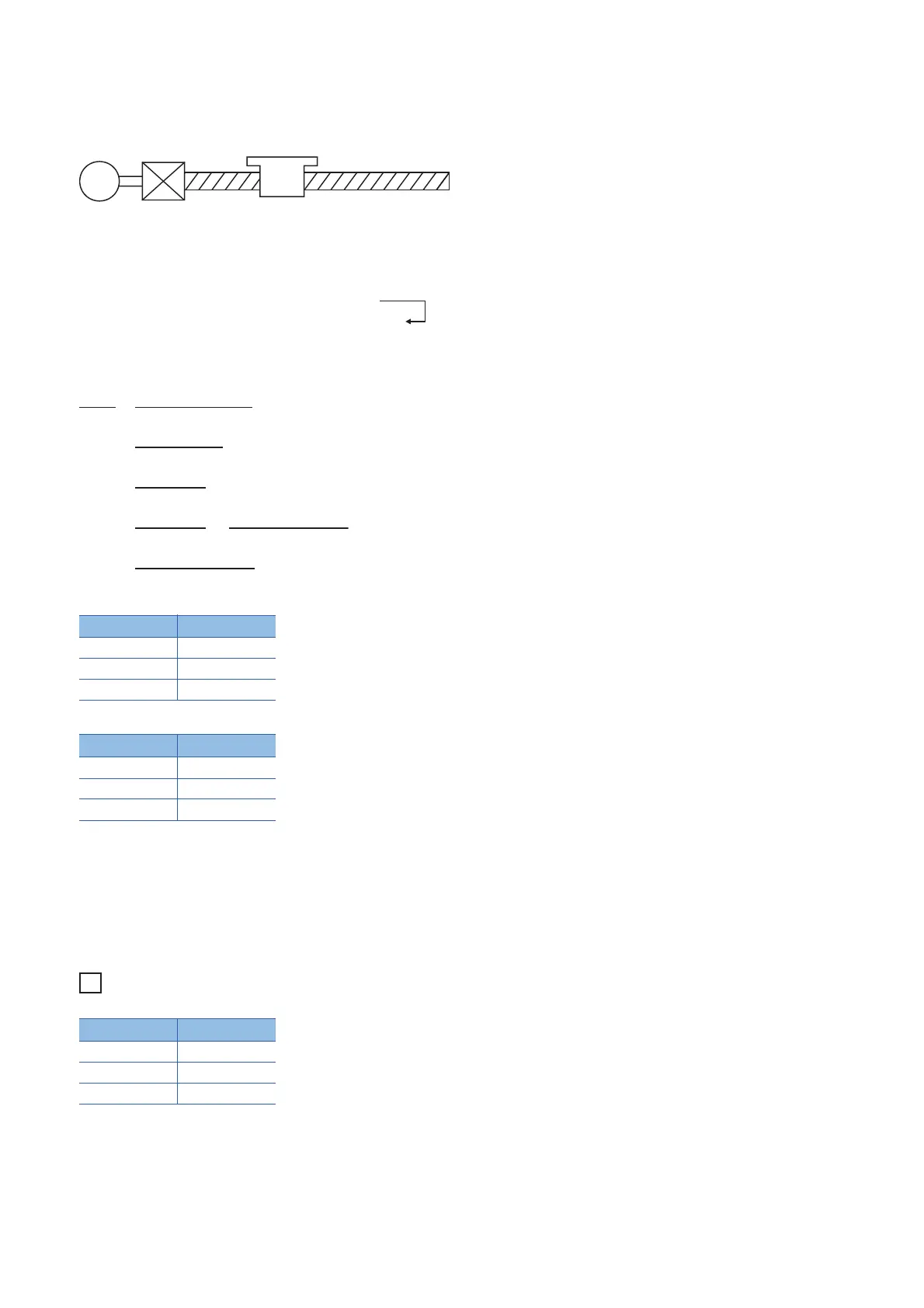
■For "Ball screw" + "Reduction gear"
When the ball screw pitch is 10 mm, the motor is the HG-KR (4194304 pulses/rev) and the reduction ratio of the reduction
gear is 9/44.
First, find how many millimeters the load (machine) will travel (S) when the motor turns one revolution (AP).
Substitute this for the above expression (1).
At this time, make calculation with the reduction ratio 9/44 remaining as a fraction.
Thus, AP, AL and AM to be set are as follows.
or
*1 These two examples of settings are only examples. There are settings other than these examples.
■When "pulse" is set as the control unit
When using pulse as the control unit, set the electronic gear as follows.
AP = "Number of pulses per rotation"
AL = "Movement amount per rotation"
AM = 1
When the motor is the HG-KR (4194304 pulses/rev)
Setting value Setting item
AP = 23068672 [Pr.2]
AL = 11250.0 [Pr.3]
AM = 1 [Pr.4]
Setting value Setting item
AP = 23068672 [Pr.2]
AL = 1125.0 [Pr.3]
AM = 10 [Pr.4]
Setting value Setting item
AP = 4194304 [Pr.2]
AL = 4194304 [Pr.3]
AM = 1 [Pr.4]
AP (Number of pulses per rotation)
ΔS (Movement amount per rotation)
= 10 [mm]
× 9/44
When the control unit is
"mm", the minimum
command unit is 0.1 m.
= 4194304 [pulse]
= Ball screw pitch
× Reduction ratio
= 10000.0 [μm]
× 9/44
AP
ΔS
=
4194304 [pulse]
10000.0 [μm] × 9/44
=
4194304 × 44
10000.0 × 9
=
184549376
90000.0
=
23068672
11250.0
=
23068672(AP)
11250.0(AL) × 1(AM)
=
23068672(AP)
1125.0(AL) × 10(AM)

 Loading...
Loading...