90
3 MAJOR POSITIONING CONTROL
3.2 Setting the Positioning Data
2-axis circular interpolation control with center point designation
In "2-axis circular interpolation control" ("[Da.2] Control method" = ABS circular right, INC circular right, ABS circular left, INC
circular left), two motors are used to carry out position control in an arc path having an arc address as a center point, while
carrying out interpolation for the axis directions set in each axis. (Refer to Page 64 Interpolation control for details on
interpolation control.)
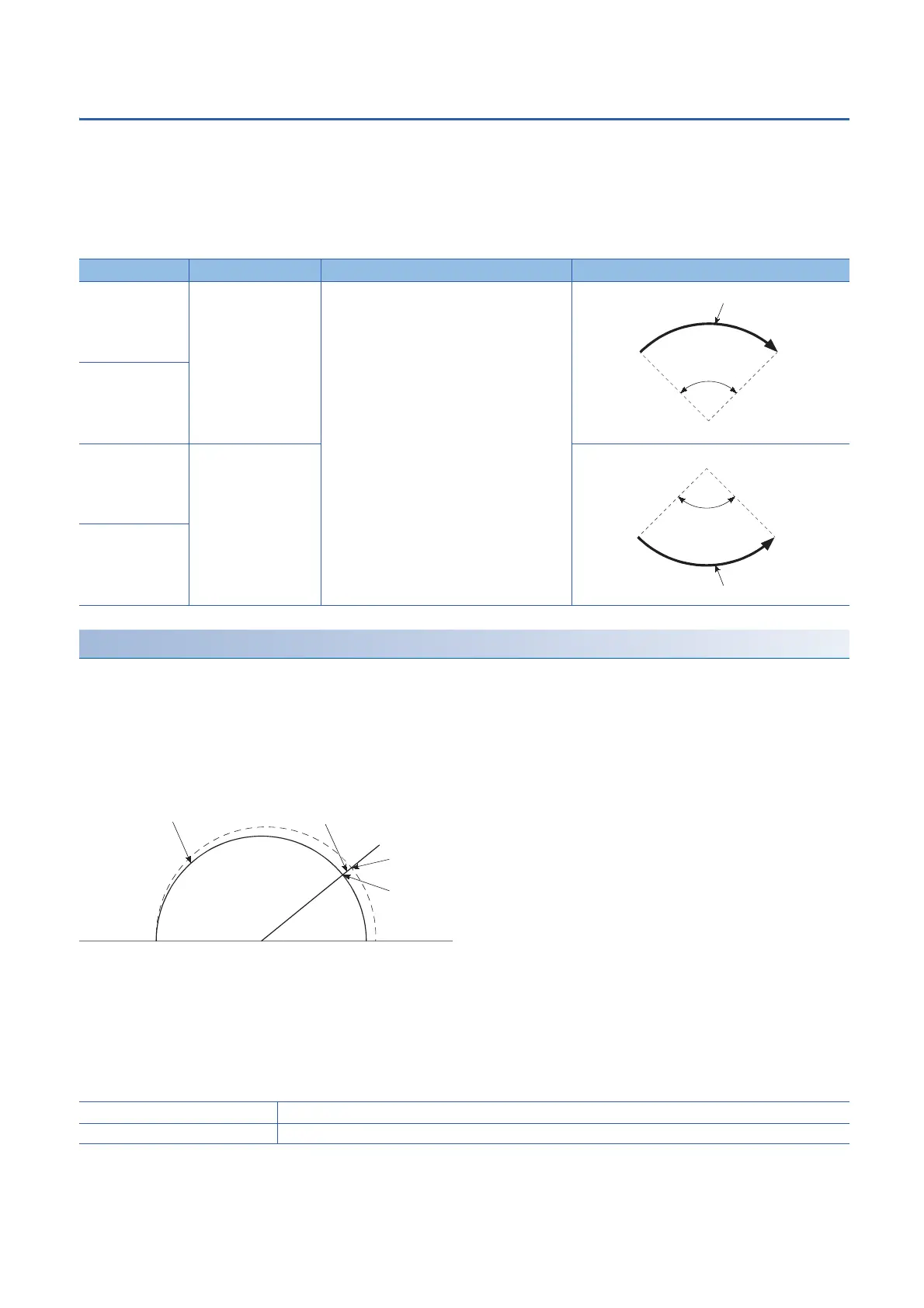
The following table shows the rotation directions, arc center angles that can be controlled, and positioning paths for the
different control methods.
Circular interpolation error compensation
In circular interpolation control with center point designation, the arc path calculated from the start point address and center
point address may deviate from the position of the end point address set in "[Da.6] Positioning address/movement amount".
(Refer to Page 430 [Pr.41] Allowable circular interpolation error width.)
■Calculated error "[Pr.41] Allowable circular interpolation error width"
Circular interpolation control to the set end point address is carried out while the error compensation is carried out. (This is
called "spiral interpolation".)
In circular interpolation control with center point designation, an angular velocity is calculated on the assumption that
operation is carried out at a command speed on the arc using the radius calculated from the start point address and center
point address, and the radius is compensated in proportion to the angular velocity deviated from that at the start point.
Thus, when there is a difference (error) between a radius calculated from the start point address and center point address
(start point radius) and a radius calculated from the end point address and center point address (end point radius), the
composite speed differs from the command speed as follows.
■Calculated error > "[Pr.41] Allowable circular interpolation error width"
At the positioning start, the error "Large arc error deviation" (error code: 1A17H) will occur and the control will not start. The
machine will immediately stop if the error is detected during positioning control.
Control method Rotation direction Arc center angle that can be controlled Positioning path
ABS circular right Clockwise 0 < 360
INC circular right
ABS circular left Counterclockwise
INC circular left
Start point radius > End point radius As compared with the speed without error, the speed becomes slower as end point address is reached.
Start point radius < End point radius As compared with the speed without error, the speed becomes faster as end point address is reached.
Start point
(current stop
position)
End point
(positioning
address)
Positioning path
0
°
< θ
≤
360
°
Center point
Start point
(current stop
position)
End point
(positioning
address)
Center point
Positioning path
0
°
< θ
≤
360
°
Path using spiral interpolation
Center point address
Start point address
Error
Calculated end point address
End point address

 Loading...
Loading...