12 DATA USED FOR POSITIONING CONTROL
12.3 Basic Setting
425
12
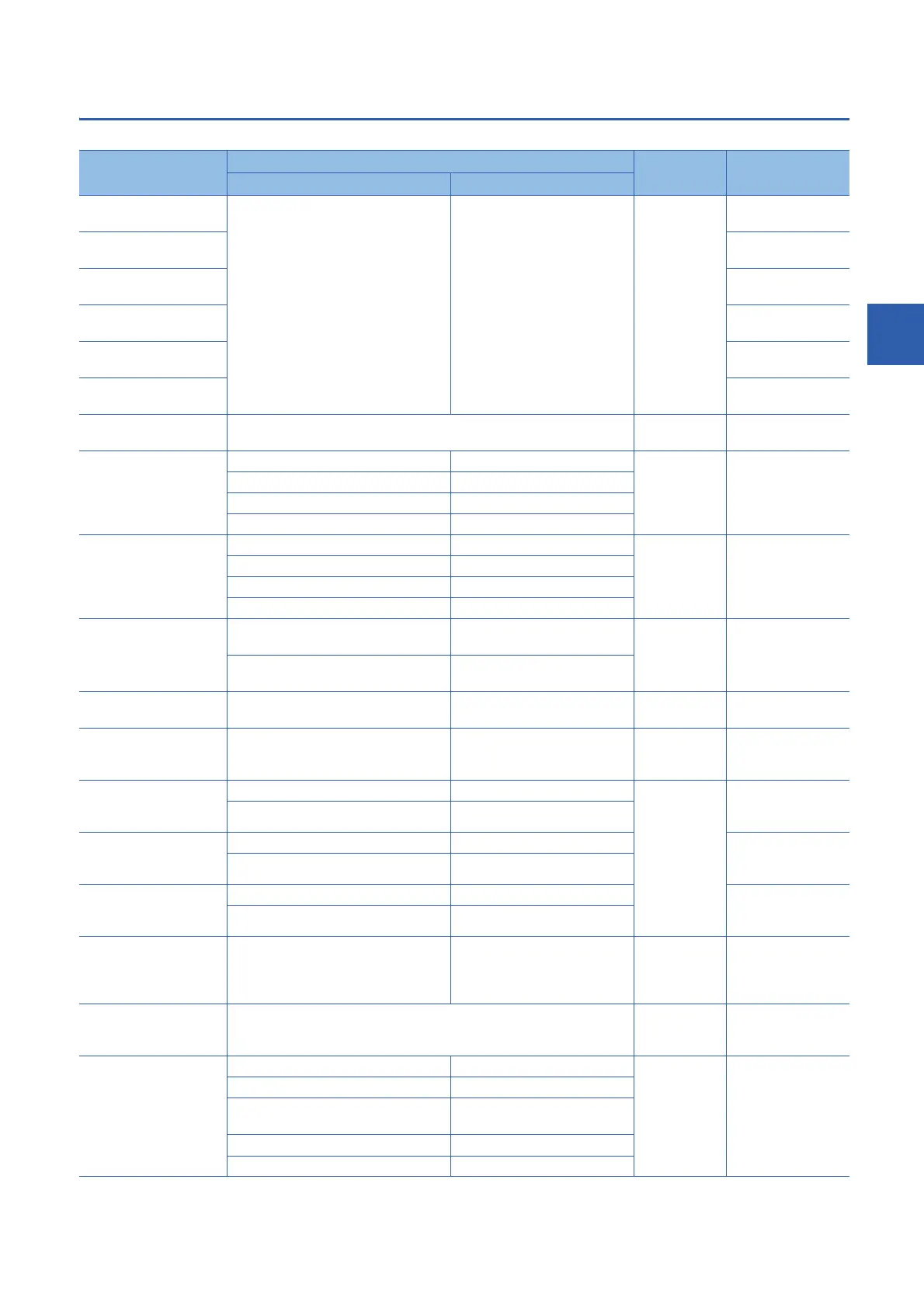
Detailed parameters2
n: Axis No. - 1
Item Setting value, setting range Default value Buffer memory
address
Value set with the engineering tool Value set with a program
[Pr.25]
Acceleration time 1
1 to 8388608 (ms) 1 to 8388608 (ms) 1000 36+150n
37+150n
[Pr.26]
Acceleration time 2
38+150n
39+150n
[Pr.27]
Acceleration time 3
40+150n
41+150n
[Pr.28]
Deceleration time 1
42+150n
43+150n
[Pr.29]
Deceleration time 2
44+150n
45+150n
[Pr.30]
Deceleration time 3
46+150n
47+150n
[Pr.31]
JOG speed limit value
The setting range differs depending on the "[Pr.1] Unit setting". 20000 48+150n
49+150n
[Pr.32]
JOG operation acceleration
time selection
0: [Pr.9] Acceleration time 0 0 0 50+150n
1: [Pr.25] Acceleration time 1 1
2: [Pr.26] Acceleration time 2 2
3: [Pr.27] Acceleration time 3 3
[Pr.33]
JOG operation deceleration
time selection
0: [Pr.10] Deceleration time 0 0 0 51+150n
1: [Pr.28] Deceleration time 1 1
2: [Pr.29] Deceleration time 2 2
3: [Pr.30] Deceleration time 3 3
[Pr.34]
Acceleration/deceleration
process selection
0: Trapezoid acceleration/deceleration
process
0 0 52+150n
1: S-curve acceleration/deceleration
process
1
[Pr.35]
S-curve ratio
1 to 100 (%) 1 to 100 (%) 100 53+150n
[Pr.36]
Sudden stop deceleration
time
1 to 8388608 (ms) 1 to 8388608 (ms) 1000 54+150n
55+150n
[Pr.37]
Stop group 1 sudden stop
selection
0: Normal deceleration stop 0 0 56+150n
1: Sudden stop 1
[Pr.38]
Stop group 2 sudden stop
selection
0: Normal deceleration stop 0 57+150n
1: Sudden stop 1
[Pr.39]
Stop group 3 sudden stop
selection
0: Normal deceleration stop 0 58+150n
1: Sudden stop 1
[Pr.40]
Positioning complete signal
output time
0 to 65535 (ms) 0 to 65535 (ms)
0 to 32767: Set as a decimal
32768 to 65535: Convert into
hexadecimal and set
300 59+150n
[Pr.41]
Allowable circular
interpolation error width
The setting value range differs depending on the "[Pr.1] Unit setting". 100 60+150n
61+150n
[Pr.42]
External command function
selection
0: External positioning start 0 0 62+150n
1: External speed change request 1
2: Speed-position, position-speed
switching request
2
3: Skip request 3
4: High speed input request 4

 Loading...
Loading...