12 DATA USED FOR POSITIONING CONTROL
12.3 Basic Setting
435
12
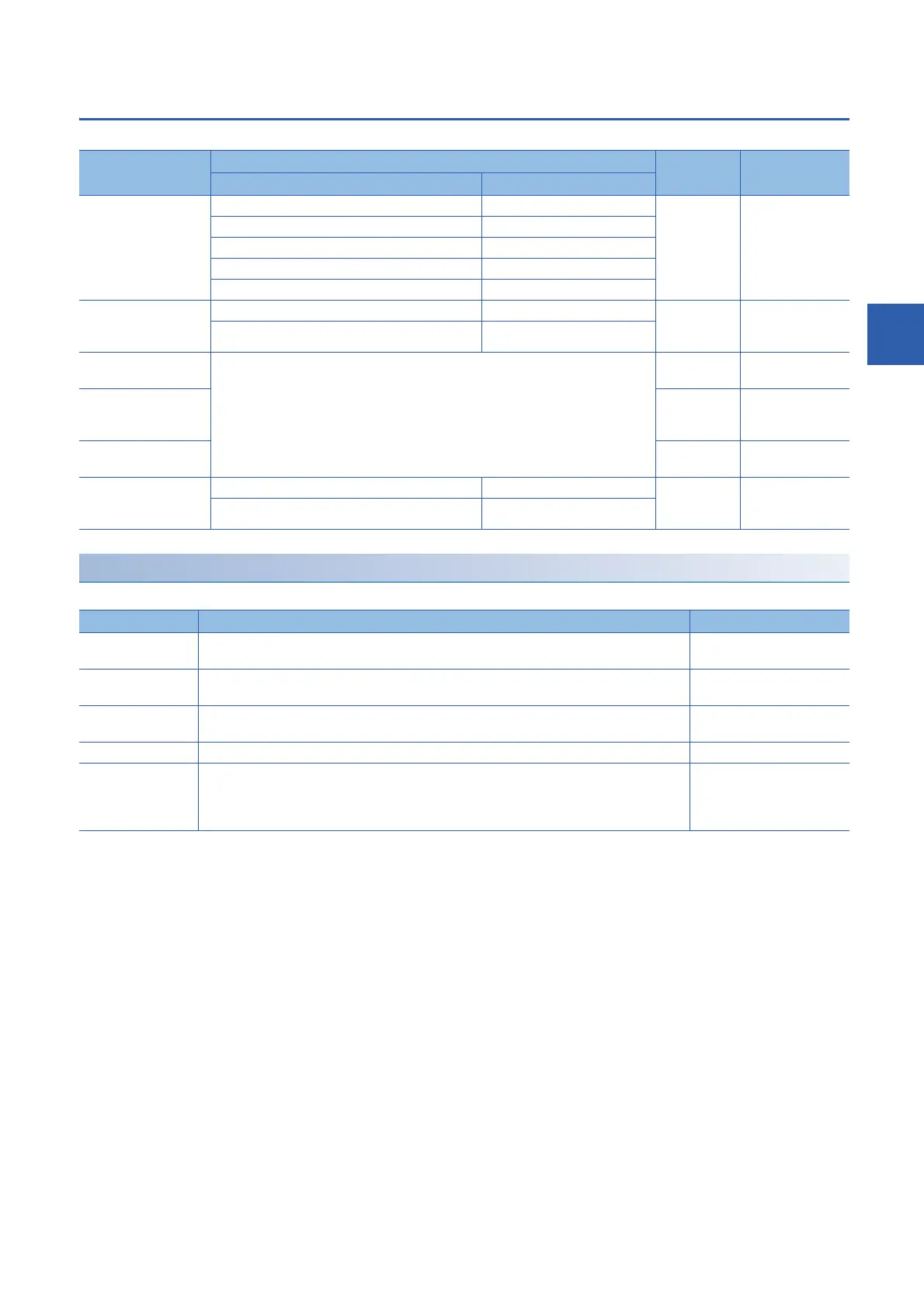
Home position return basic parameters
n: Axis No. - 1
[Pr.43] Home position return method
Set the "home position return method" for carrying out machine home position return.
Item Setting value, setting range Default
value
Buffer memory
address
Value set with the engineering tool Value set with a program
[Pr.43]
Home position return
method
0: Near-point dog method 0 0 70+150n
4: Count method 1 4
5: Count method 2 5
6: Data set method 6
7: Scale origin signal detection method 7
[Pr.44]
Home position return
direction
0: Positive direction (address increment direction) 0 0 71+150n
1: Negative direction (address decrement direction) 1
[Pr.45]
Home position address
The setting value range differs depending on the "[Pr.1] Unit setting". 0 72+150n
73+150n
[Pr.46]
Home position return
speed
1 74+150n
75+150n
[Pr.47]
Creep speed
1 76+150n
77+150n
[Pr.48]
Home position return
retry
0: Do not retry home position return with limit switch 0 0 78+150n
1: Retry home position return with limit switch 1
Setting value Details Reference
0: Near-point dog
method
After decelerating at the near-point dog ON, stop at the zero signal and complete the machine home
position return.
Page 35 Near-point dog
method
4: Count method 1 After decelerating at the near-point dog ON, move the designated distance, and complete the
machine home position return with the zero signal.
Page 37 Count method1
5: Count method 2 After decelerating at the near-point dog ON, move the designated distance, and complete the
machine home position return.
Page 39 Count method2
6: Data set method The position where the machine home position return has been made will be the home position. Page 41 Data set method
7: Scale origin signal
detection method
After deceleration stop at the near-point dog ON, move to the opposite direction against the home
position return direction, and move to the home position return direction after deceleration stop once
at the detection of the first zero signal. Then, it stops at the detected nearest zero signal, and
completes the machine home position return.
Page 42 Scale origin
signal detection method

 Loading...
Loading...