230
8 CONTROL SUB FUNCTIONS
8.3 Functions for Compensating the Control
The method for compensating the error
When the position control is carried out using the "Electronic gear" set in a parameter, this may produce an error between the
command movement amount (L) and the actual movement amount (L'). With Simple Motion module, this error is
compensated by adjusting the electronic gear.
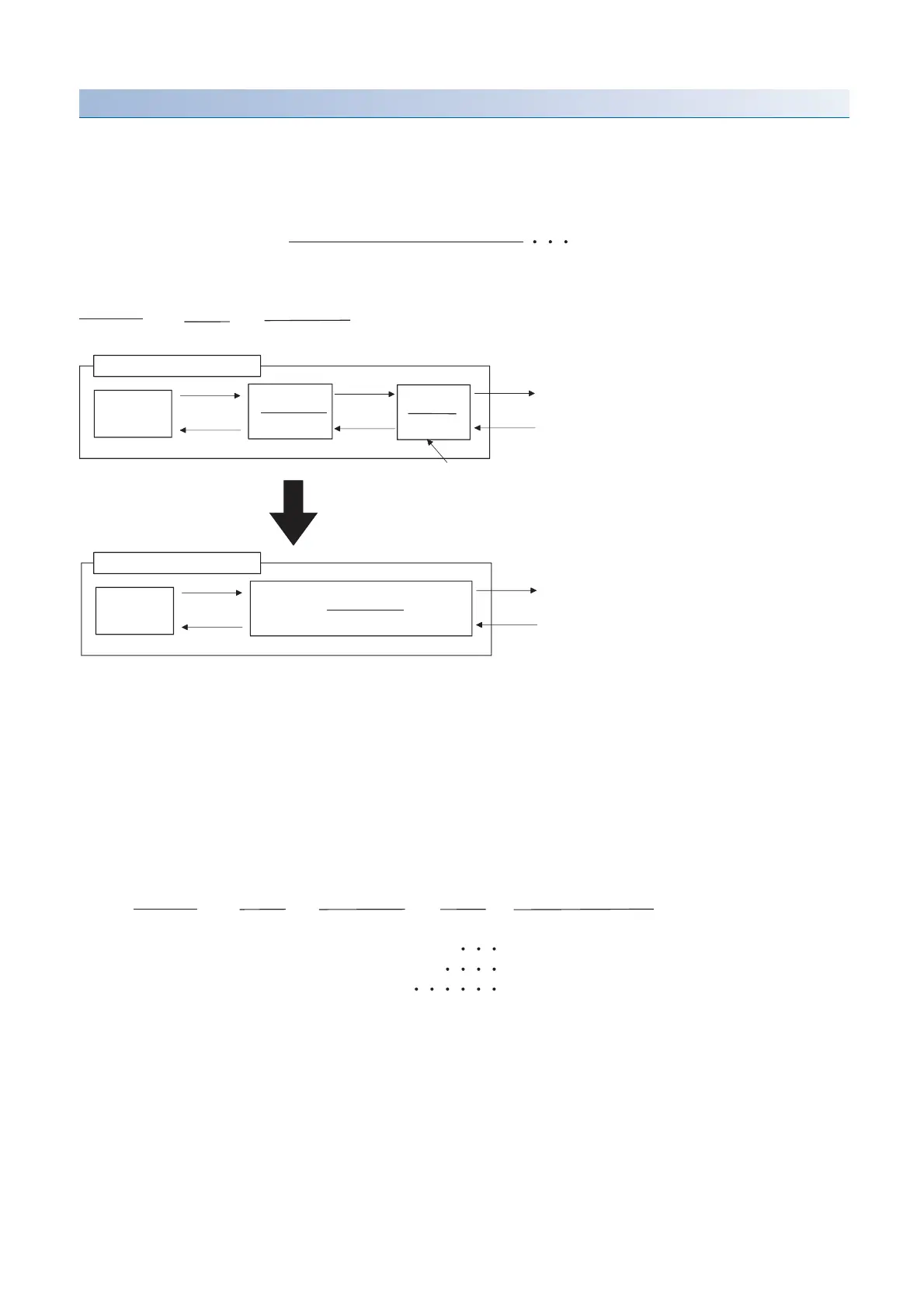
The "Error compensation amount", which is used for error compensation, is defined as follows:
The electronic gear including an error compensation amount is shown below.
■Calculation example
Set the post-compensation "[Pr.2] Number of pulses per rotation (AP')", "[Pr.3] Movement amount per rotation (AL')", and
"[Pr.4] Unit magnification (AM')" in the parameters, and write them to the Simple Motion module. The set details are validated
at the rising edge (OFF ON) of the PLC READY signal [Y0].
Error compensation amount =
Command movement amount (L)
Actual movement amount (L')
(2)
AP
AL × AM
×
L
L'
=
AP'
AL' × AM'
AP
AL × AM
L
L'
pulse
Servo amplifier
Simple Motion module
1 if there is no error (in regular case)
AP'
AL' × AM'
pulse
Servo amplifier
Electronic gear taking an error into consideration
Simple Motion module
Command
value
Command
value
Control
unit
Control
unit
(Conditions)
Number of pulses per rotation (AP) : 4194304 [pulse]
Movement amount per rotation (AL) : 5000.0 [μm]
Unit magnification (AM)
: 1
(Positioning results)
Command movement amount (L) : 100 [mm]
Actual movement amount (L') : 101 [mm]
(Compensation value)
AP
AL × AM
×
L
L'
=
4194304
5000.0 × 1
=
4194304(AP')
5050(AL') × 1(AM')
×
100
101
Number of pulses per rotation (AP') : 4194304
Movement amount per rotation (AL') : 5050.0
Unit magnification (AM')
: 1
[Pr.2]
[Pr.3]
[Pr.4]

 Loading...
Loading...