422
12 DATA USED FOR POSITIONING CONTROL
12.3 Basic Setting
[Pr.20] Interpolation speed designation method
When carrying out linear interpolation/circular interpolation, set whether to designate the composite speed or reference axis
speed.
When the 4-axis linear interpolation or 2 to 4-axis speed control is performed, specify the reference axis
speed.
If the composite speed is specified, the error "Interpolation mode error" (error code: 199AH) occurs when the
positioning operation starts.
When the circular interpolation control or 3-axis helical interpolation control is performed, specify the
composite speed. If the reference axis speed is specified, the error "Interpolation mode error" (error code:
199BH) occurs when the positioning operation starts.
[Pr.21] Current feed value during speed control
Specify whether you wish to enable or disable the update of "[Md.20] Current feed value" while operations are performed
under the speed control (including the speed control in speed-position and position-speed switching control).
• When the speed control is performed over two to four axes, the choice between enabling and disabling the
update of "[Md.20] Current feed value" depends on how the reference axis is set.
• Set "1" to exercise speed-position switching control (ABS mode).
Setting value Details
0: Composite speed The movement speed for the control target is designated, and the speed for each axis is calculated by the Simple
Motion module.
1: Reference axis speed The axis speed set for the reference axis is designated, and the speed for the other axis carrying out interpolation is
calculated by the Simple Motion module.
Setting value Details
0: The update of the current feed value is
disabled
The current feed value will not change. (The value at the beginning of the speed control will be kept.)
1: The update of the current feed value is
enabled
The current feed value will be updated. (The current feed value will change from the initial.)
2: The current feed value is cleared to zero The current feed value will be set initially to zero and change from zero while the speed control is in effect.
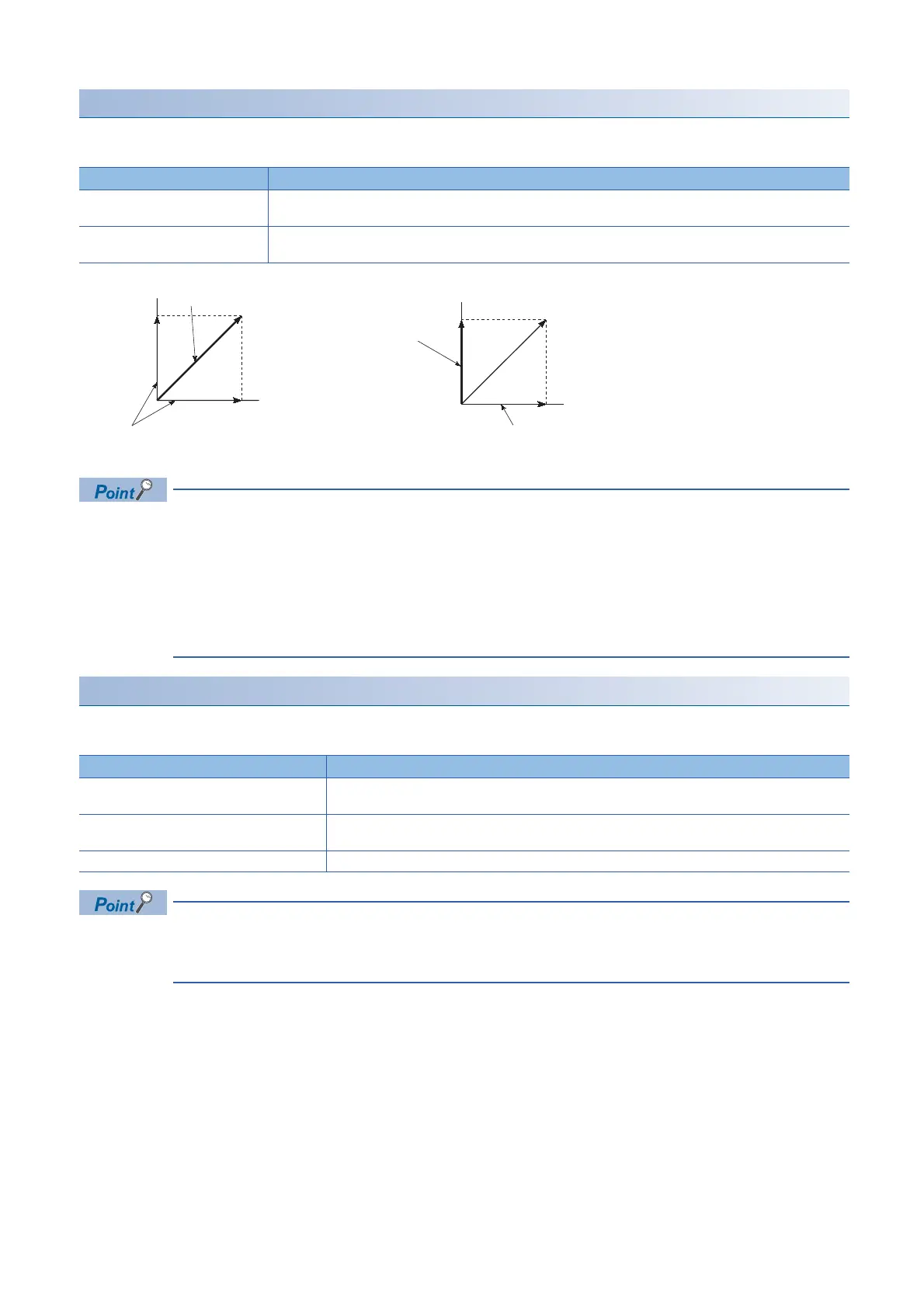
Designate composite speed
X axis
Calculated by Simple Motion module
Y axis
Designate speed
for reference axis
X axis
Calculated by Simple Motion module
Y axis
<When composite speed is designated> <When reference axis speed is designated>

 Loading...
Loading...