1 - 6 1 - 6
MELSEC-Q
1 GENERAL DESCRIPTION
1.3 About the PID Operation
The Q62HLC can perform PID control in measured value incomplete differentiation.
1.3.1 Operation method and formula
The PID control in measured value incomplete differentiation is an operation method
which puts the first-order delay filter as the input for derivative control action, and
performs PID operation with the error value (E) after deleting the high-frequency noise
component.
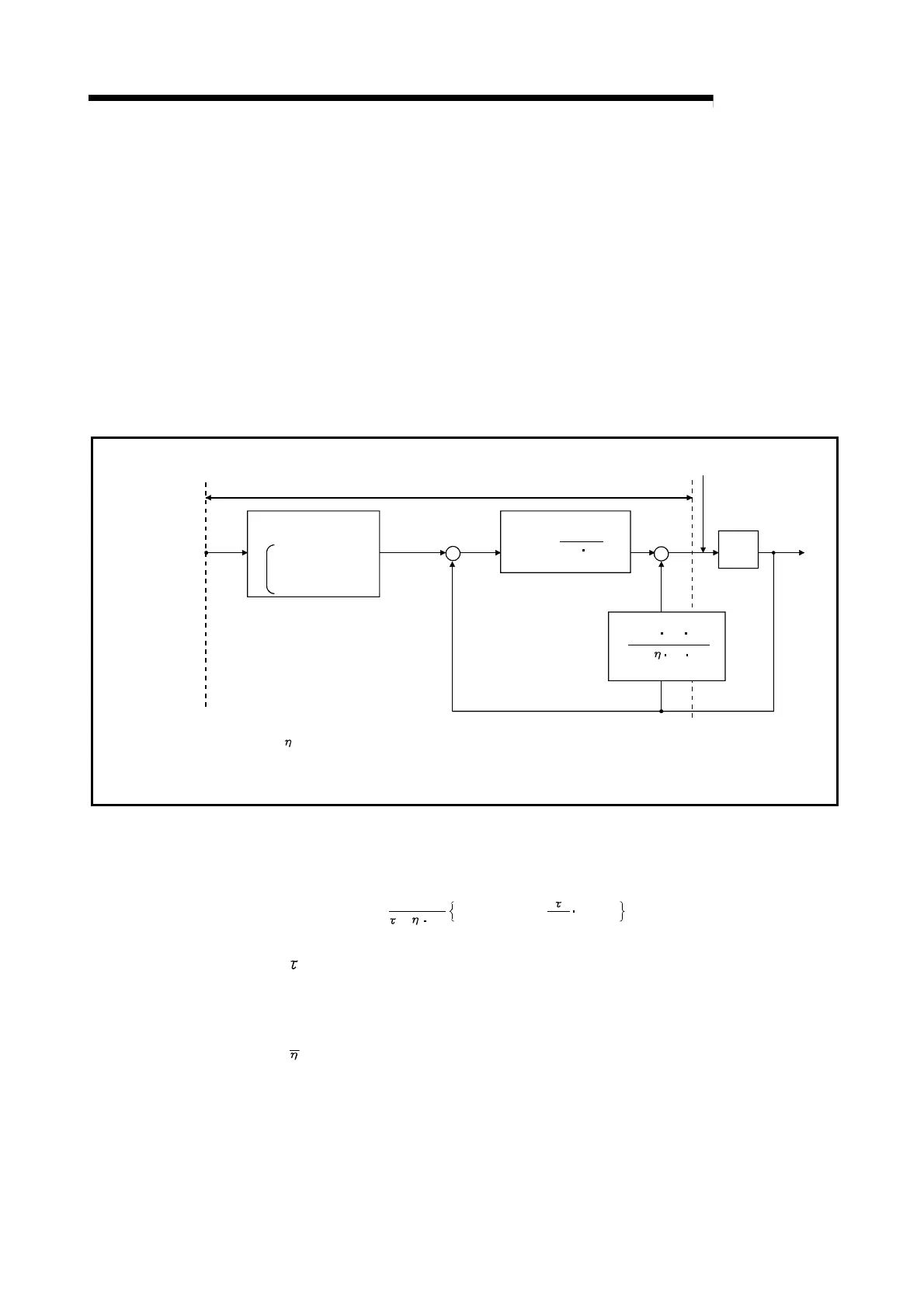
(1) The algorithm of the PID control in measured value incomplete
differentiation is shown in Figure 1.5.
SV(Set value)
Q62HLC
+
+
-
-
Disturbance D
Control object
PV(Measured value)
MV
: Proportional gain
: Integral time
: Derivative time
G(s)
Control response
parameters
Kp(1+ )
1
Kp T
D
s
1+ T
D S
Slow
Normal control
Fast
Ti s
Kp
Ti
T
D
s
: Derivative gain
: Laplace transform conversion
Fig. 1.5 Algorithm of PID control in measured value incomplete differentiation
(2) The formula used for Q62HLC is shown below:
V
n
= MV
n-1
+
T
D
+
T
D
(PV
n-1
- PV
n
) -
T
D
MV
n-1
: Sampling period
MV : Incomplete derivative output
PV : Measured value
T
D : Derivative time
1
: Derivative gain

 Loading...
Loading...







