Frequency and Maximum Frequency of Motor on page 5-19 and 6-1-2
Basic Motor Parameter Set-
tings on page 6-4.
Execute auto-tuning. (Refer to 6-8-1 Motor Off-line Auto-tuning on page 6-65.)
Then set the rated current value of the motor at 1st Motor Electronic Thermal Level (F11).
Set the value correctly according to the motor in use.
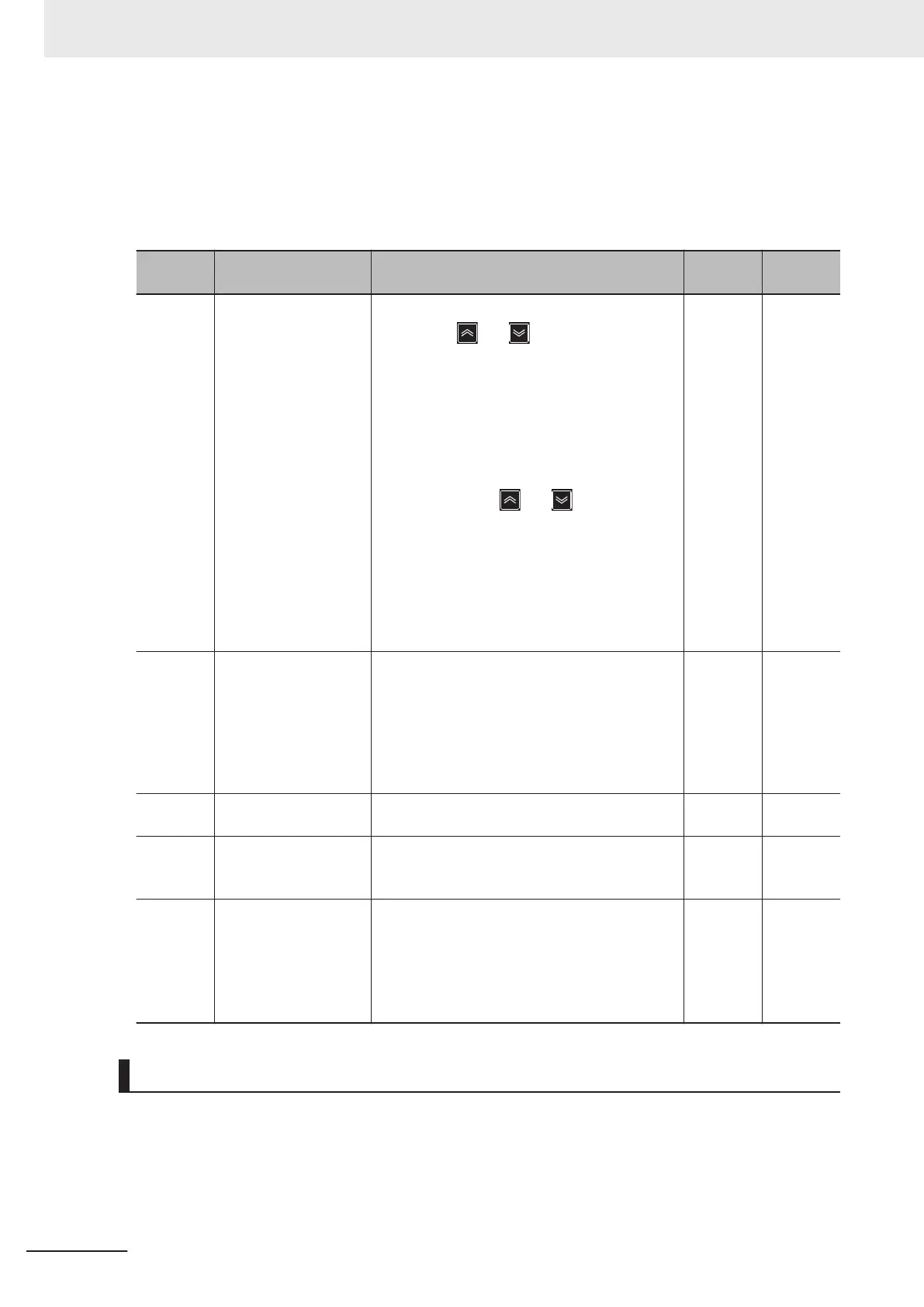
Parame-
ter No.
Function name Set value
Default
data
Unit
F01 1st Frequency Refer-
ence Selection
0 to 15
0 -
0: Operator ( and keys)
1: Analog voltage input (terminal AI1)
2: Analog current input (terminal AI2 (AII))
3: Analog voltage input (terminal AI1) + analog
current input (terminal AI2 (AII))
5: Analog voltage input (terminal AI2 (AIV))
7: UP/DOWN control
8: Digital Operator (
and keys) (balance-
lessbumpless switching available)
10: Pattern operation
12: Pulse train input
13: Calculation result
14: RS-485 communication
15: Fieldbus (Reserved)
F02 1st RUN Command
Selection
0: Operator (Direction of rotation input: terminal
block)
1: External signal (Digital input)
2: Operator (Forward rotation)
3: Operator (Reverse rotation)
4: RS-485 communication
5: Fieldbus (Reserved)
2 -
P01 1st Motor Pole Num-
ber
2 to 128 poles
4 Pole
P02 1st Motor Capacity 0.01 to 1000 kW Depend-
ent on ca-
pacity
kW
F11 1st Motor Electronic
Thermal Level
0.00 ; 0.01 to 118.8
0.00 : Disable
0.01 to 1
18.8 A
* Setting range from 1%(HHD) to 135%(ND) of
the rated inverter current.
Depend-
ent on ca-
pacity
A
No-Load Run
In a motor no-load state (not connected to the mechanical system), rotate the motor via the Digital Op-
erator.
Forward/reverse rotation via Digital Operator
Follow the steps below to rotate the motor in the forward or reverse direction via Digital Operator.
3 Operation and Test Run
3-20
M1 Series Standard Type User's Manual (I669)

 Loading...
Loading...








