48
System Functions Section 3-3
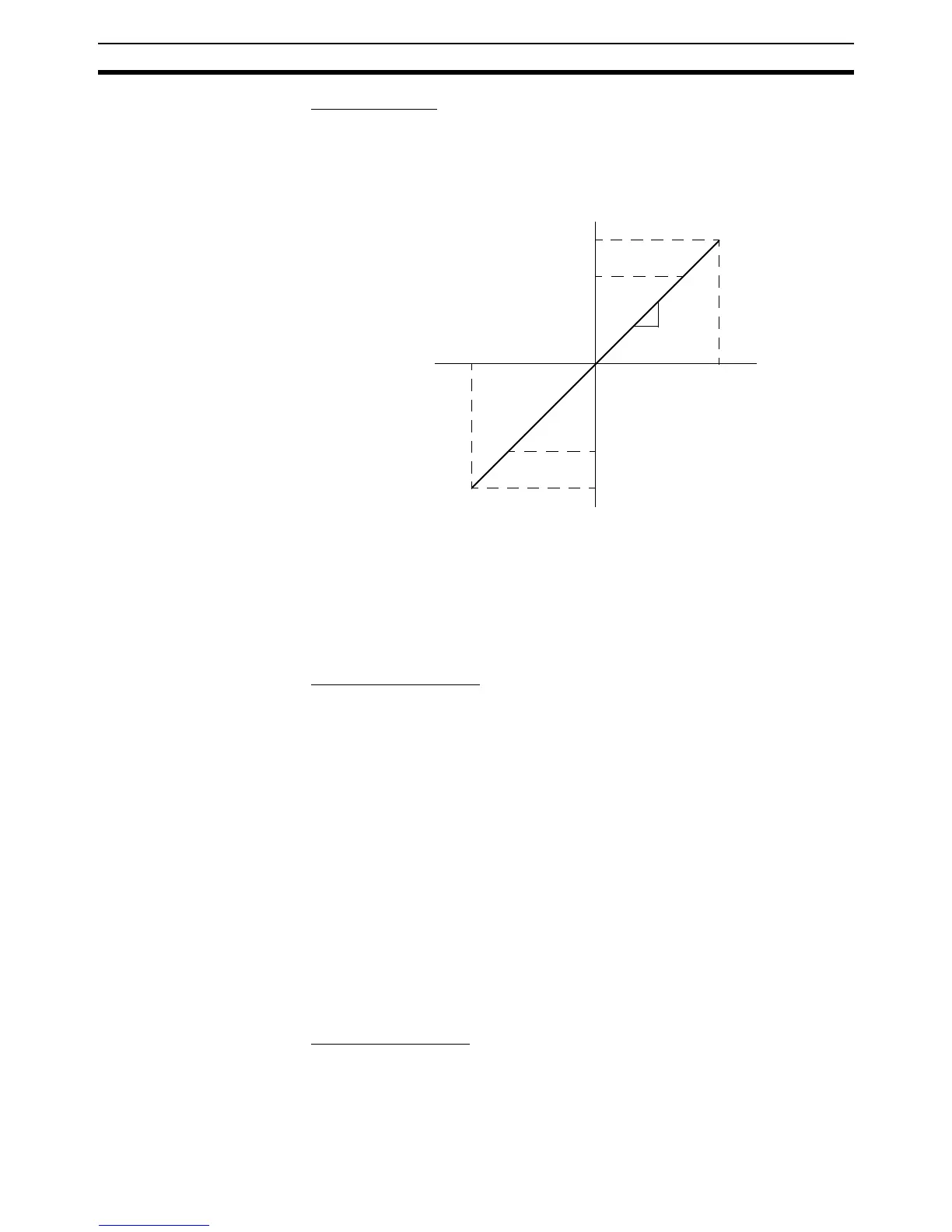
■ Speed Reference
The Servomotor rotational speed is proportional to the speed reference value
resulting from either servo control or open loop (S_REF parameter). The
speed reference characteristics are given in the following graph.
The speed characteristics are Servomotor dependent. The S_RATE axis
parameter specifies the speed reference rate of the attached motor. This rate
is defined as the amount of Rotational speed (in RPM) per unit of speed refer-
ence.
■ Programming Example
In the following example a simple motion application including initiation for a
single axis is shown.
init:
BASE(0)
P_GAIN=.5: I_GAIN=0: D_GAIN=0
VFF_GAIN=0: OV_GAIN=0
ACCEL=1000
DECEL=1000
SPEED=500
WDOG=ON
SERVO=ON
loop:
MOVE(500)
WAIT IDLE
WA(250)
MOVE(-500)
WAIT IDLE
WA(250)
GOTO loop
■ Torque Limit Settings
During speed control, it is possible to limit the torque applied by the Servo
Driver by using the torque reference. The required Servo Driver setting is
Pn002.0=1 and refer to the Torque control section below for details on the
torque reference.
Speed
reference
Rotational
Speed [RPM]
15000
-15000
1
S_RATE
Overspeed (+)
Overspeed (-)
Rated speed (+)
Ratedspeed(-)
Rotational Speed [RPM] Speed Reference S_RATE⋅=