49
System Functions Section 3-3
Torque Control The Torque Control mode is used to apply a fixed torque, independent of the
travelling speed. This mode can be used for specific applications which
require a constant pressure.
To set up a Motion Application with Torque Control, the following setting in the
Servo Driver is required.
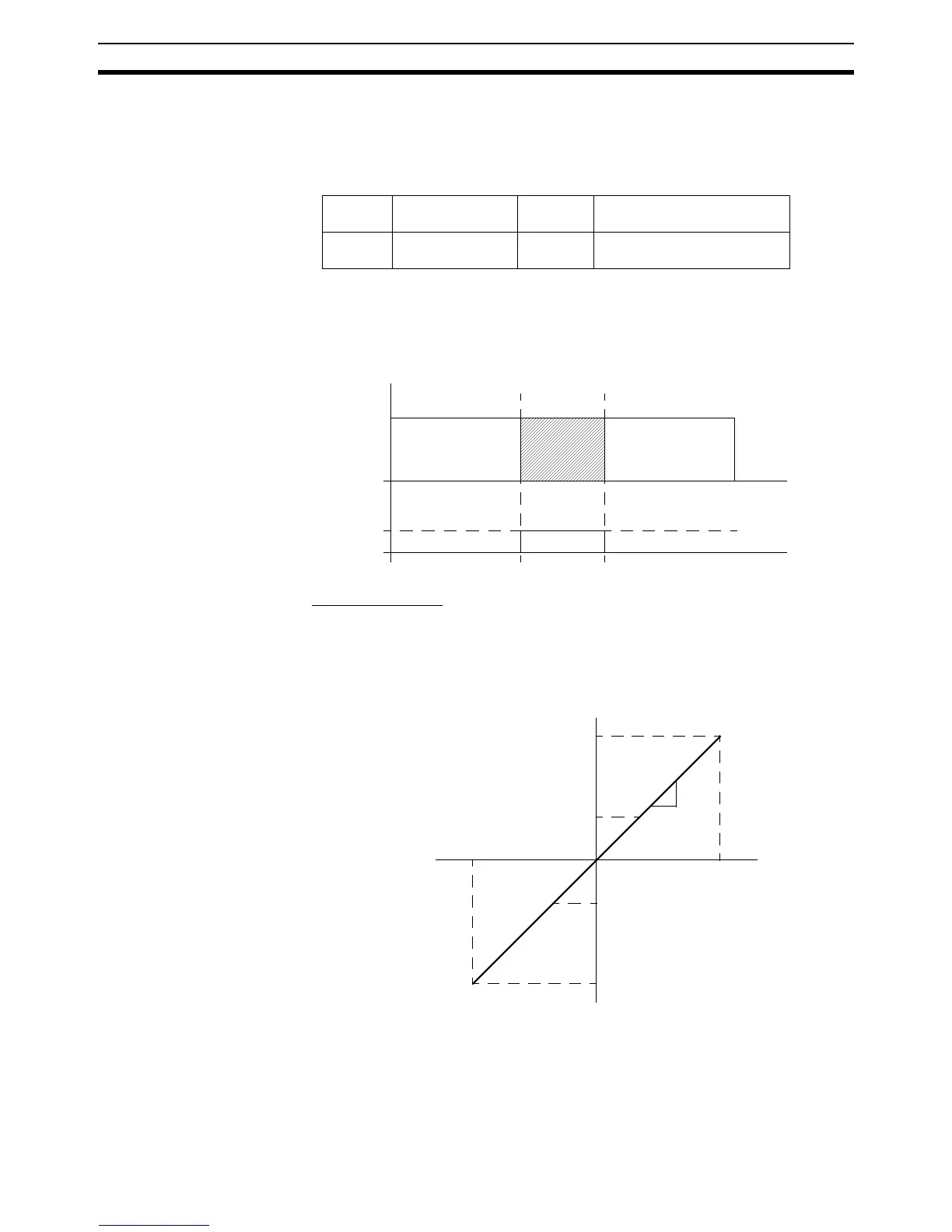
The output no. 16 is used to control the switch between speed and torque
control during operation. Speed control will be applied when OP(16)=OFF,
and torque control will be enabled when OP(16)=ON. The torque control ref-
erence value is set by the T_REF axis parameter.
■ Torque Reference
The torque applied to the Servomotor is proportional to the torque reference
value defined by the T_REF axis parameter. The torque reference character-
istics are given in the following graph.
The torque characteristics are Servomotor dependent. The actual applied
torque of the Servomotor as percentage of the rated torque can be deter-
mined by using the T_RATE axis parameter.
Param-
eter No.
Parameter Name Required
Setting
Explanation
Pn000.1 Control Mode
Selection
9 Torque / Speed Control
Speed
Control
Speed
Control
Torque
Control
Time
OP(16)
ONOFF OFF
Torque
reference
Applied Torque
[% of rated torque]
15000
-15000
1
T_RATE
Max. torque (+)
Max. torque (-)
Rated torque
(+ 100%)
Rated torque
(- 100%)
Applied Torque [% of rated torque] T_REF T_RATE⋅=