6-15
6-5 Brake Interlock
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
6
Applied Functions
Operating Example
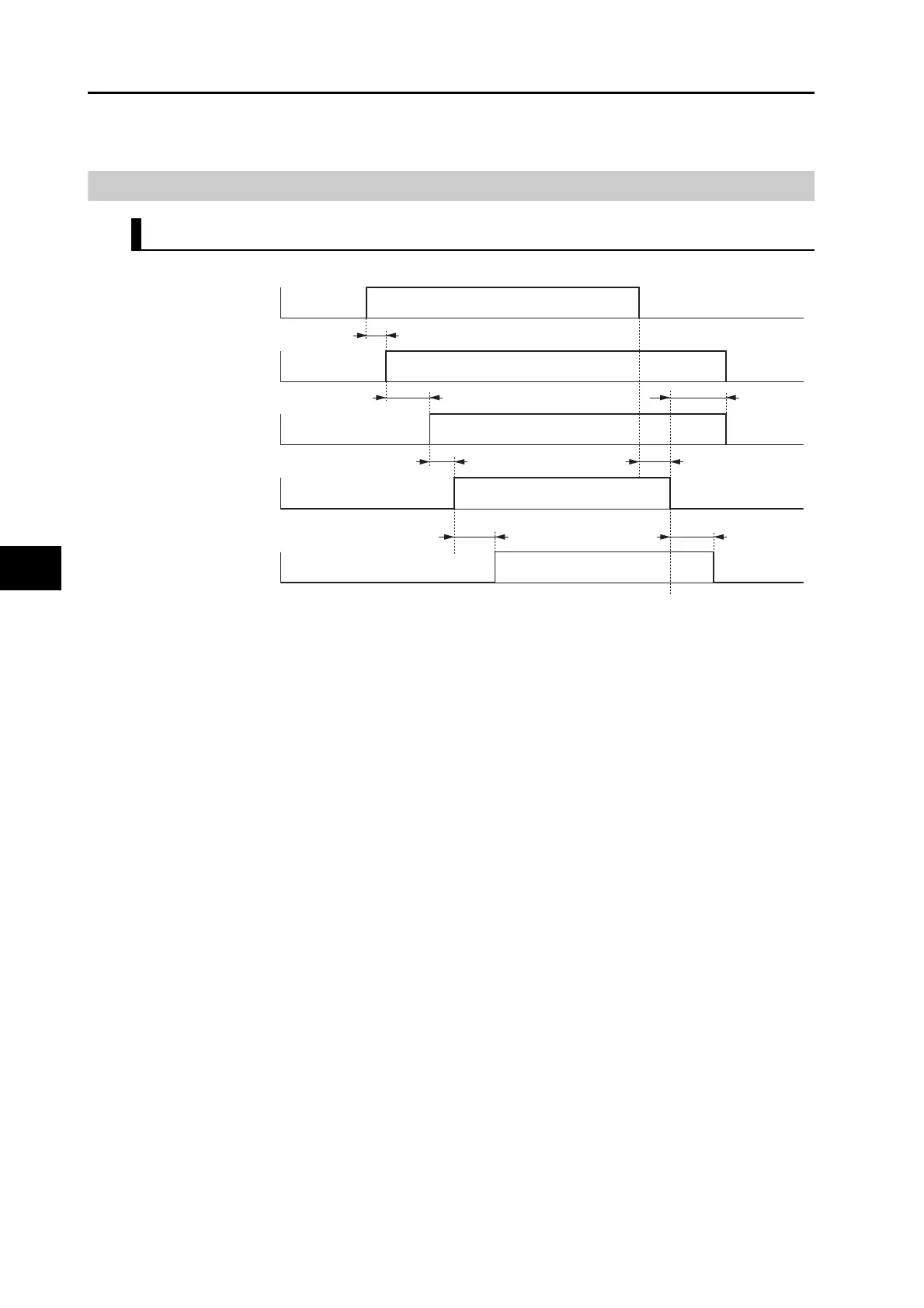
Servo ON/OFF Operation Timings when Motor Is Stopped
*1. The servo does not turn ON until the motor rotation speed drops to approx. 30 r/min or below.
*2. The dynamic brake operation when the servo is OFF depends on Stop Selection with Servo OFF (Pn506).
*3. The Brake Interlock output (BKIR) is output when the OR condition is met by a release request command from the
Servo control and from the MECHATROLINK-II. In the above example, the MECHATROLINK-II makes no release
request. The BKIR is assigned to the general-purpose output (CN1).
Operation command (RUN)
ON
OFF
Dynamic brake relay
ON
OFF
Motor power supply
ON
OFF
ON
OFF
Approx. 2 ms
Approx. 4 ms 1 to 6 ms
Approx. 60 ms
Brake interlock
output (BKIR)
*3
Released
Held
Attraction time
Release time
Servo OFF Servo OFFServo ON
*1
DB engaged
*1
DB engaged
*2
DB released
Power supplyNo power supply
No power supply
Pn437
Release request
Holding brake operation
Brake released

 Loading...
Loading...