3-57
3-3 Servomotor Specifications
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
3
Specifications
Encoder Specifications
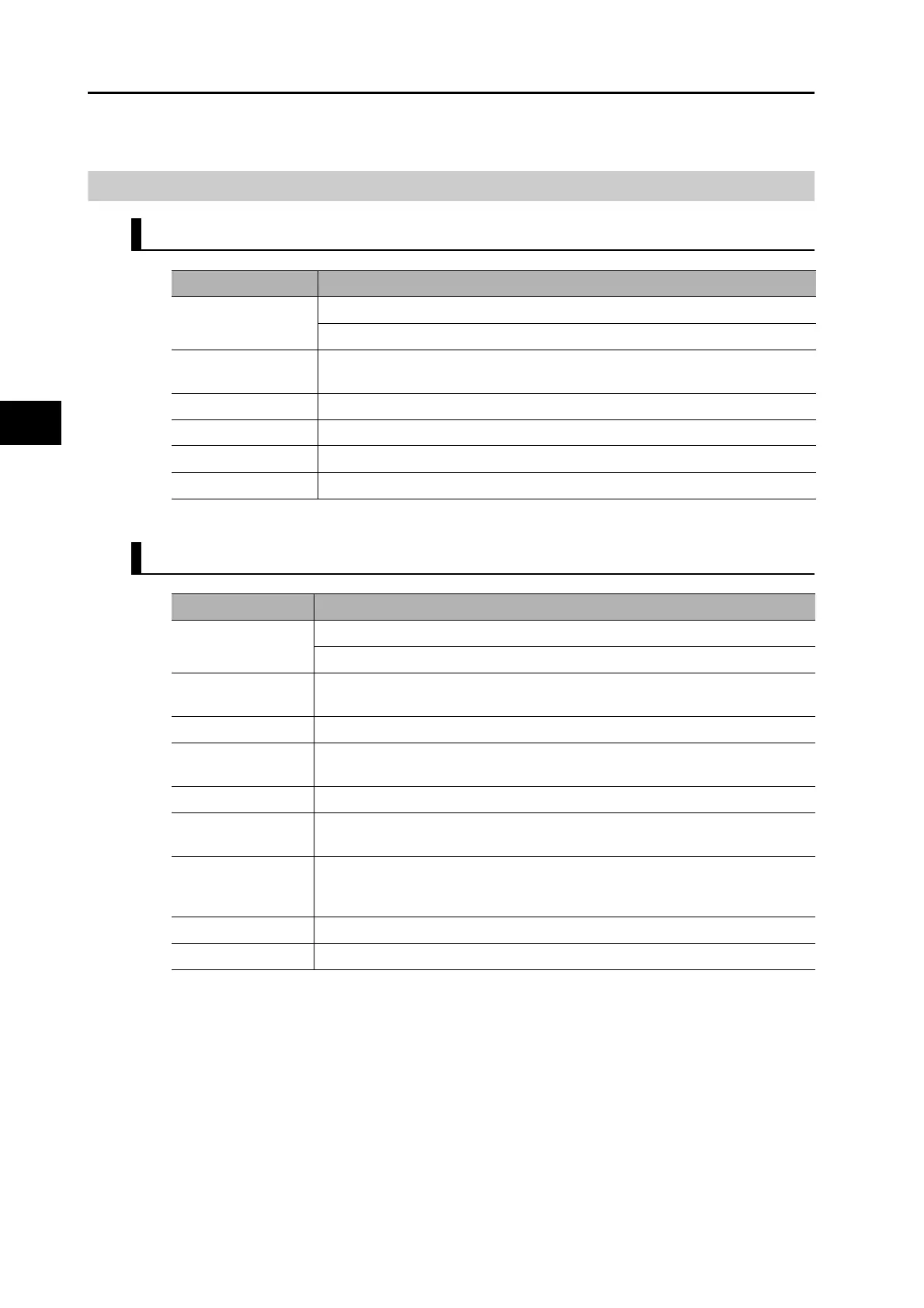
Incremental Encoder Specifications
Absolute Encoder Specifications
Note: Multi-rotation Data Backup
The multi-rotation data will be lost if the battery cable connector is disconnected at the motor when
connecting the battery cable for the absolute encoder and battery.
If you do not use an absolute encoder battery cable and connect the battery to CN1, the multi-rotation
data will be lost if CN2 is disconnected.
Item Specifications
Encoder system Optical encoder
20 bits
Number of output
pulses
Phases A and B: 262,144 pulses/rotation
Phase Z: 1 pulse/rotation
Power supply voltage 5 VDC 5%
Power supply current 180 mA (max.)
Output signals S, S
Output interface RS485 compliance
Item Specifications
Encoder system Optical encoder
17 bits
Number of output
pulses
Phases A and B: 32,768 pulses/rotation
Phase Z: 1 pulse/rotation
Maximum rotations 32,768 to 32,767 rotations
Power supply
voltage
5 VDC 5%
Power supply current 110 mA (max.)
Applicable battery
voltage
3.6 VDC
Current consumption
of battery
265 A (for a maximum of 5 s right after power interruption)
100 A (for operation during power interruption)
3.6 A (when power is supplied to the drive)
Output signals S, S
Output interface RS485 compliance
 Loading...
Loading...
