8-17
8-2 Gain Parameters
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
8
Parameters Details
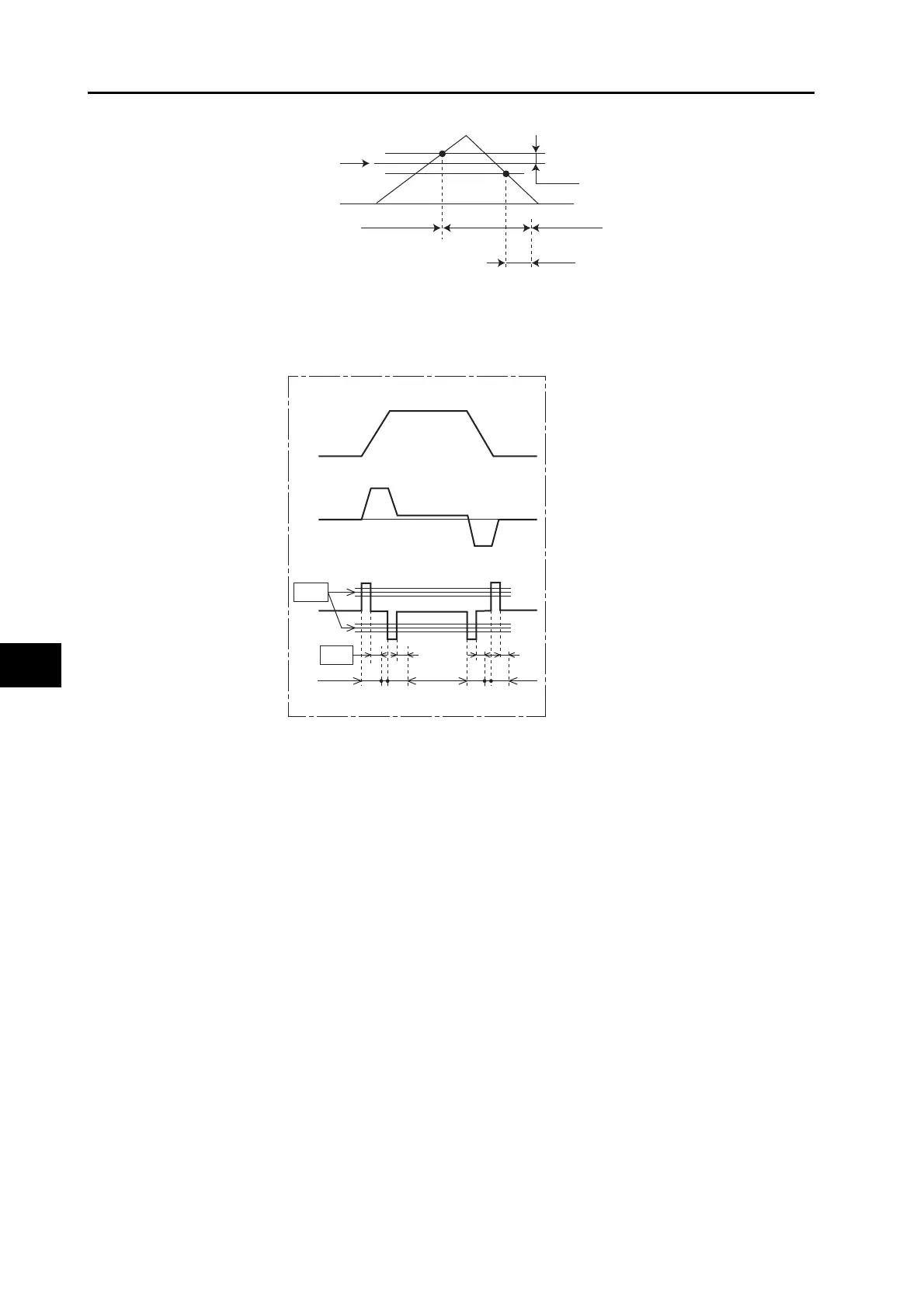
*2. The Gain Switching Hysteresis in Torque Control (Pn127) is defined in the drawing below..
*3. When the Gain switching command of MECHATROLINK-II communications is 0, the gain switches to
Gain 1. When the command is 1, the gain switches to Gain 2.
*4. The variation means the change amount in a millisecond (ms).
E.g. The set value is 200 when the condition is a 10% change in torque in 1 millisecond.
Pn126
0
Pn127
Pn125
Gain 1
Gain 2
Gain 1
H
L
H
L
Figure A
Speed V
Torque T
ΔT
Time
1
1
22 22
1
1Gain 1
Level

 Loading...
Loading...