8-23
8-3 Vibration Suppression Parameters
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
8
Parameters Details
Set the Damping Frequency 4 to suppress vibration at the end of the load in damping control.
Measure the frequency of vibration at the end of the load and make the setting in units of 0.1 Hz.
Setting frequency is 1.0 to 200.0 Hz. The function is disabled if the setting is 0 to 0.9 Hz.
Refer to "10-5 Damping Control (P.10-21)" for more information on settings.
First set the
Damping Frequency 4 (Pn220). Then reduce the setting if torque saturation occurs or
increase the setting to increase operation speed. Normally, use a setting of 0.
Set value is restricted in the following manner.
Upper limit: Up to the
Damping Frequency 4
Lower limit:
Damping frequency + damping filter setting 100
Refer to "10-5 Damping Control (P.10-21)" for more information on settings.
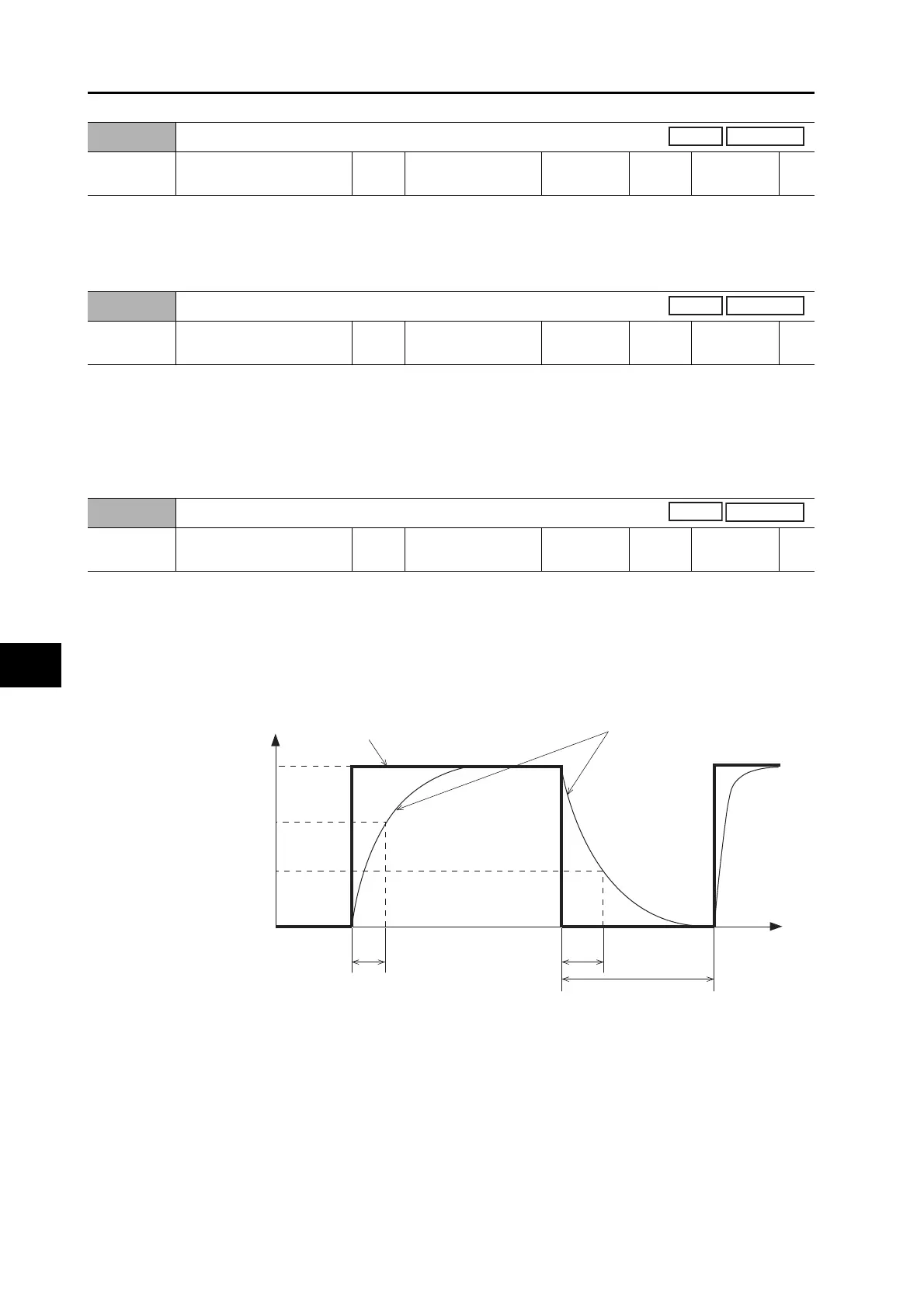
The Position Command Filter Time Constant is the first-order lag filter that is inserted after the
electronic gear ratio for the command input.
The Constant is used to reduce the stepping movement of the motor and achieve a smooth
operation when the electronic gear ratio is set in 10 times or greater.
It sets the first-order lag filter time constant, as shown below, for the square-wave command of
target speed Vc.
Pn220
Damping Frequency 4
Setting
range
0 to 2000 Unit 0.1 Hz
Default
setting
0
Data
attribute
B
Pn221
Damping Filter 4 Setting
Setting
range
0 to 1000 Unit 0.1 Hz
Default
setting
0
Data
attribute
B
Pn222
Position Command Filter Time Constant
Setting
range
0 to 10000 Unit 0.1 ms
Default
setting
0
Data
attribute
B
Position
t
f
= (Pn222×0.1 ms)
*1 The actual process involves calculation error.
*2 If accumulated pulses remain within the filter after the filter set value has
been changed, etc., the motor may operate at a speed higher than the
command speed immediately after switching the filter.
Input position command
t
f
Position command after
the smoothing filter process
t
f
Filter switching
dwell time
*2
Time
Speed
Target speed Vc
Vc×0.632
*1
Vc×0.368
*1
 Loading...
Loading...
