A-4
A-1 Parameter List
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
A
Appendix
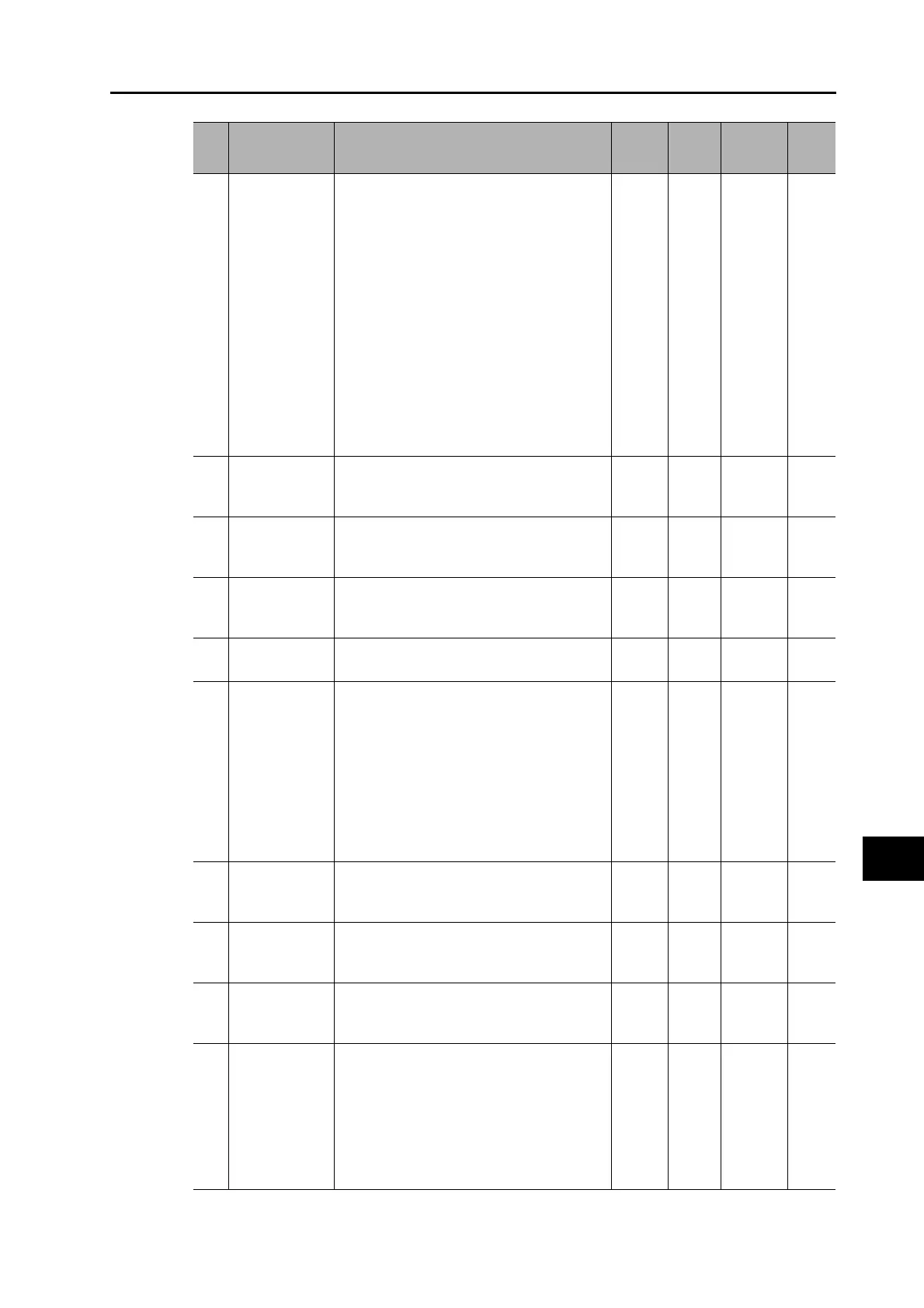
Pn No.
Parameter
name
Function and description
Default
setting
Unit
Setting
range
Data
attribute
115
SWITCHING
mode in
Position Control
Select the gain switching condition for
position control.
It is necessary that Pn114 be set to 1.
0: Always gain 1
1: Always gain 2
2: Gain switching command input via
MECHATROLINK-II communications
3: Torque command change amount
4: Always gain 1
5: Command speed
6: Amount of position error
7: When the position command is received.
8: Positioning completion signal (INP) OFF
9: Actual motor speed
10: Combination of position command input
and rotation speed
0
0 to 10 B
116
Gain Switching
Delay Time in
Position Control
Set the delay time for switching from gain 2
to gain 1.
50 0.1 ms
0 to
10000
B
117
Gain Switching
Level in
Position Control
Set the gain switching level. 50
0 to
20000
B
118
Gain Switching
Hysteresis in
Position Control
Set the hysteresis for gain switching. 33
0 to
20000
B
119
Position Gain
Switching Time
Set the position gain switching time for gain
switching.
33 0.1 ms
0 to
10000
B
120
SWITCHING
mode in Speed
Control
Select the gain switching condition for speed
control.
It is necessary that Pn114 be set to 1.
0: Always gain 1
1: Always gain 2
2: Gain switching command input via
MECHATROLINK-II communications
3: Torque command change amount
4: Speed command change amount
5: Command speed
0
0 to 5 B
121
Gain Switching
Delay Time in
Speed Control
Set the delay time for switching from gain 2
to gain 1.
0 0.1 ms
0 to
10000
B
122
Gain Switching
Level in Speed
Control
Set the gain switching level. 0
0 to
20000
B
123
Gain Switching
Hysteresis in
Speed Control
Set the hysteresis for gain switching. 0
0 to
20000
B
124
SWITCHING
mode in Torque
Control
Sele
ct the gain switching condition for
torque control.
It is necessary that Pn114 be set to 1.
0: Always gain 1
1: Always gain 2
2: Gain switching command input via
MECHATROLINK-II communications
3: Torque command change amount
0
0 to 3 B

 Loading...
Loading...