Parker Hannifin
P Series User Guide 213
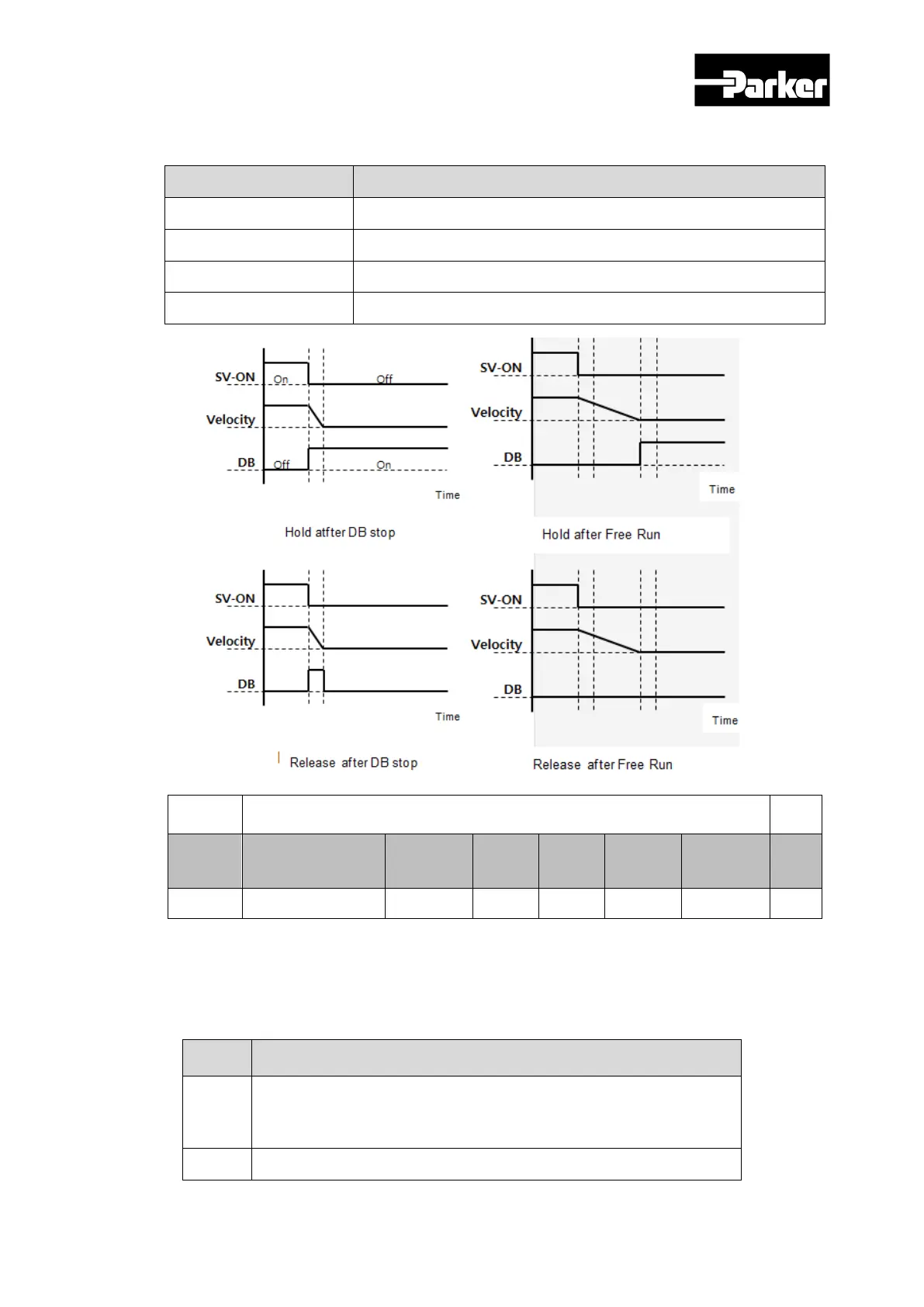
Sets the dynamic brake control mode when turning off the servo
Set Value Descriptions
0 Stop with the dynamic brake and hold
1 Stop with the dynamic brake and release
2 Stop free run and release
3 Stop free run and hold
0x2013
Emergency Stop Configuration ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 1 1 - RW No Servo Off Yes
Sets how the motor stops in case of emergency stop (when POT, NOT, ESTOP is
input). The deceleration/stop mode with emergency stop torque is not applied under
the torque control mode.
Descriptions
0
Stop the motor using the method set at the dynamic brake mode
(0x2012)
Stop the motor using the dynamic brake and maintain the torque
1 Decelerate and stop using the emergency stop torque(0x2113)

 Loading...
Loading...







