Parker Hannifin
P Series User Guide 78
8213 0x2015
Mask
0x2014 UINT 0 0 0xFFFF - RW
8214 0x2016
Current
0x2015 INT 0
-
1000
1000 0.10% RW
8215 0x2017
Current
0x2016 INT 0
-
1000
1000 0.10% RW
8216 0x2018
Current
0x2017 INT 0
-
1000
1000 0.10% RW
8217 0x2019
0x2018 UINT 2400 1 65535 0.01mm RW
8218 0x201A
0x2019 UINT 1000 1 65535 nm RW
8219 0x201B
0x201A UINT 0 0 2 - RW
8220 0x201C
0x201B UINT 500 0 1000 0.10% RW
8221 0x201D
0x201C UINT 1000 500 5000 ms RW
8222 0x201E
Period of
Sinusoidal
0x201D UINT 40 1 65535 Um RW
8223 0x201F
Done
0x201E UINT 0 0 1 - RW
8224 0x2020
Function
0x201F UINT 0 0 2 - RW
8225 0x2021
Phase
0x2020 UINT 0 0 1 - RW
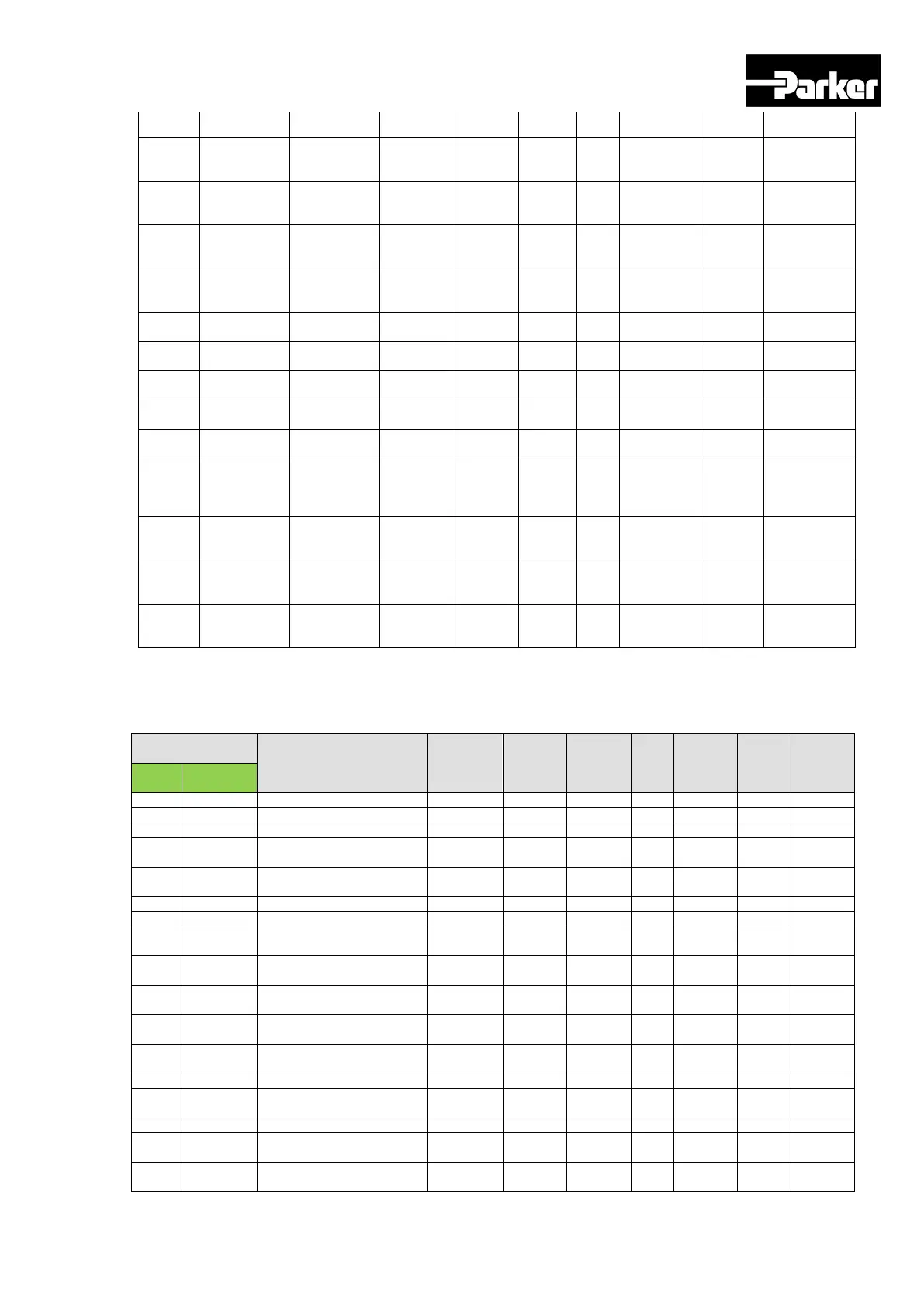
Table 35. System Configuration Parameters
4.3.2 Control Parameters
parameter name
paramete
r No.
Variable
Format
Default
Value
Min Max Unit
Accessi
bility
8451 0x2103
Speed Loop Integral Time
Constant 1
0x2103 UINT 50 1 1000 ms RW
8452 0x2104
Torque Command Filter
Time Constant 1
0x2104 UINT 0 0 1000 0.1ms RW
8455 0x2107
Speed Loop Integral Time
Constant 2
0x2107 UINT 50 1 1000 ms RW
8456 0x2108
Torque Command Filter
Time Constant 2
0x2108 UINT 0 0 1000 0.1ms RW
8457 0x2109
Position Command Filter
Time Constant
0x2109 UINT 0 0 1000 0.1ms RW
8458 0x210A
Position Command Average
Filter Time Constant
0x210A UINT 0 0 1000 0.1ms RW
8459 0x210B
Speed Feedback Filter
Time Constant
0x210B UINT 2 0 1000 0.1ms RW
8461 0x210D
Speed Feed-forward Filter
Time Constant
0x210D UINT 10 0 1000 0.1ms RW
8463 0x210F
Torque Feed-forward Filter
Time Constant
0x210F UINT 10 0 1000 0.1ms RW
8464 0x2110
Torque Limit Function
Select
0x2110 UINT 2 0 4 - RW

 Loading...
Loading...







