Parker Hannifin
P Series User Guide 156
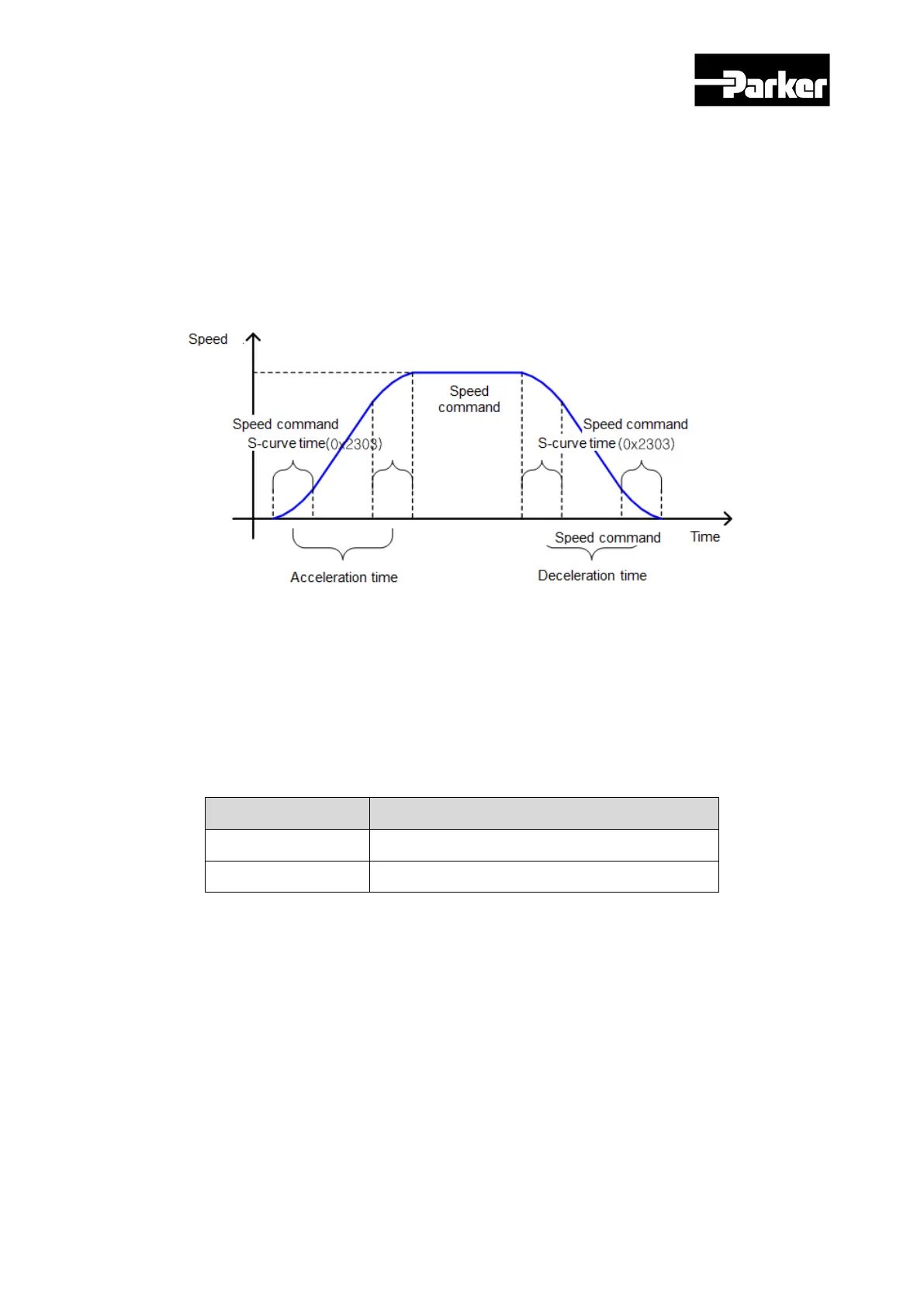
Acceleration time = speed command/ rated speed x speed command deceleration time
(0x2301)
Deceleration time = speed command/ rated speed x speed command acceleration time
(0x2302)
As shown in the figure below, you can operate the machine by creating a S-curve
acceleration/deceleration profile by setting the speed command s-curve time to 1[ms] or
more. Please note the relationship between acceleration/deceleration time and S-curve time.
Figure 47. Smooth Acceleration and Deceleration
6.8.2 Servo Lock Function
When controlling speed, the servo’s position is not locked even when the speed command is
0. This is due to the characteristic of speed control. By setting the servo-lock function
(0x2311), you can lock the servo position.
Set Value Details
0
Servo-lock function not used
1
Servo-lock function used
Table 81. Servo Lock Function
When using the servo-lock function, the position is internally control based on the position at
the time when the speed command is input as 0. When the speed command is not 0, the
control is changed into normal speed.
6.8.3 Related Signal
As shown in the figure below, when the value of the speed feedback goes under the ZSPD
output range (0x2404), the ZSPD (0 speed) signal is displayed. If the value goes over the
TGON output range (0x2405), the TGON (motor revolution) signal is displayed.

 Loading...
Loading...







