Parker Hannifin
P Series User Guide 219
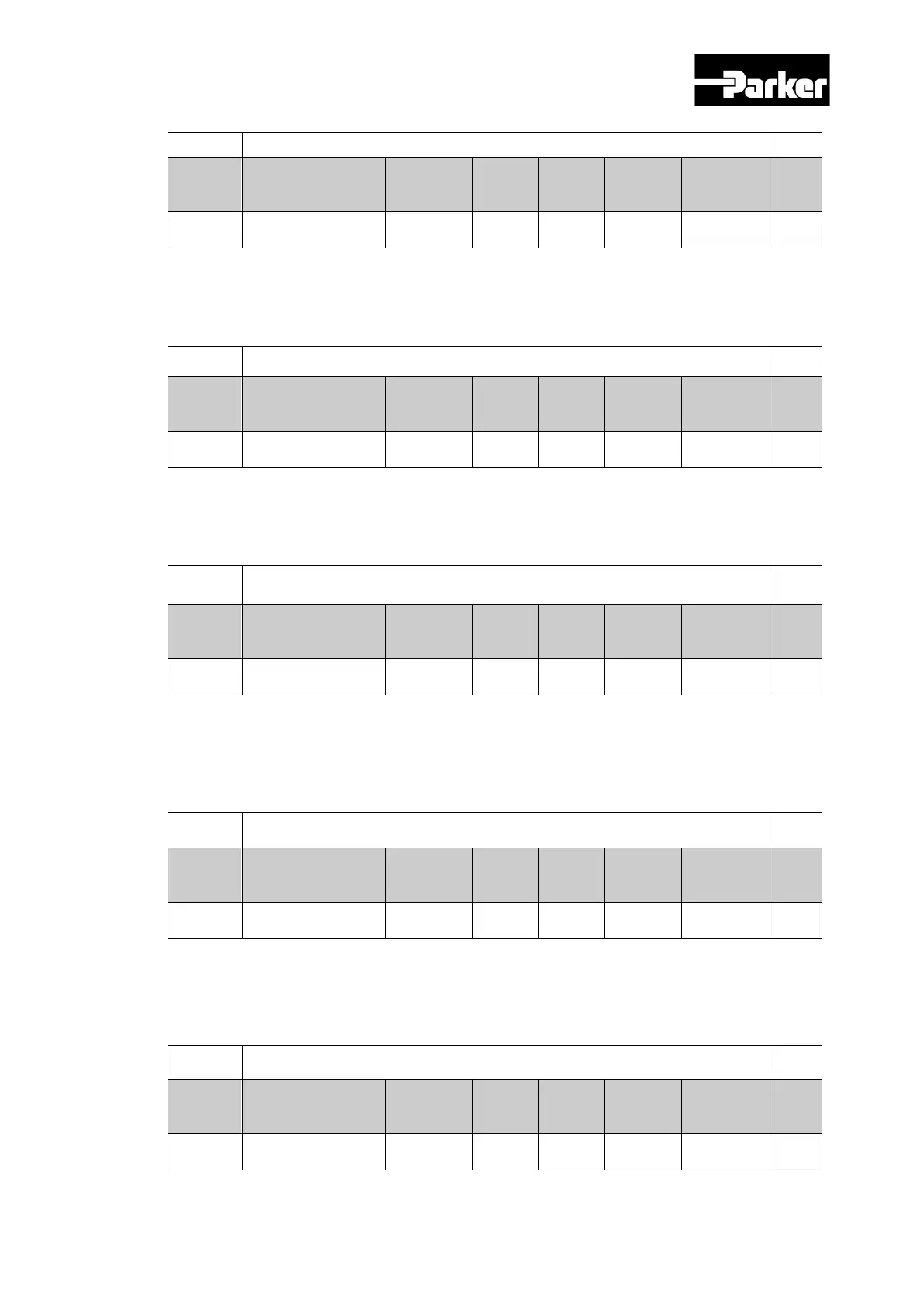
0x2109
Position Command Filter Time Constant ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 1000 0 0.1ms RW Yes
Yes
Smooth the position command by applying low pass filter to the position command. This
can be used when setting the gear ratio very high.
0x210A
Position Command Average Filter Time Constant ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 1000 0 0.1ms RW Yes
Yes
Smooth the position command by applying the movement average filter to the position
command. (To be provided in the future)
0x210B
Speed Feedback Filter Time Constant ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 1000 2 0.1ms RW Yes
Yes
Applies low pass filter to speed feedback calculated from the encoder. In case of
vibration due to gain when system vibration occurs or load with too large inertia is
applied, such vibration can be inhibited by setting the appropriate value.
0x210C
Speed Feed-forward Gain ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 100 0 % RW Yes
Yes
Sets to feed-forward gain to speed command for position control. Increasing the set
value reduces position error. Depending on the load, setting the value too high may
cause vibration or overshoot. When tuning the gain, please increase the set value
gradually.
0x210D
Speed Feed-forward Filter Time Constant ALL
e
Setting Range
Default
Value
Unit
Acces
sibility
Allocati
Change
Property
Stor
e
UINT 0 to 1000 10 0.1ms RW Yes
Yes

 Loading...
Loading...







