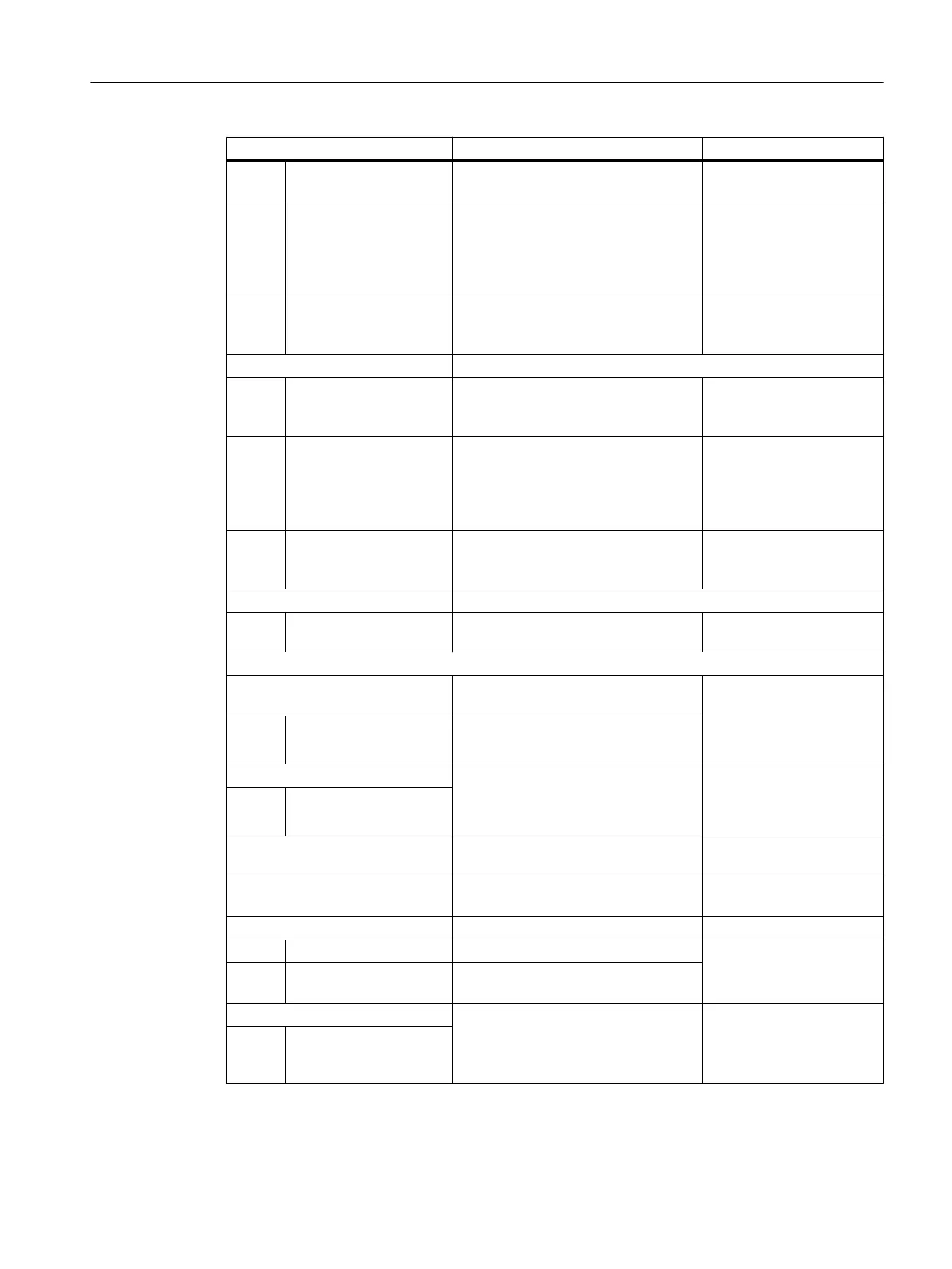
Parameter or property System variable Description
End of tool chain $NT_T_CHAIN_LAST_ELEM[n] Name of last chain ele‐
ment in the tool chain
Close tool chain
3)
● Auto
● No
● Yes
$NT_CNTRL[n] Bit 8 Close tool chain automati‐
cally
At chain element $NT_CLOSE_CHAIN_T[n] Name of chain element at
which the tool chain is
closed
Workpiece chain
End of workpiece chain $NT_P_CHAIN_LAST_ELEM[n] Name of last chain ele‐
ment in the workpiece
chain
Close workpiece chain
3)
● Auto
● No
● Yes
$NT_CNTRL[n] Bit 7 Close workpiece chain au‐
tomatically
At chain element $NT_CLOSE_CHAIN_P[n] Name of chain element at
which the tool chain is
closed
Linear axis
Machine axis X Y Z $NT_GEO_AX_NAME[n, 0 - 2] Name of chain element of
machine axis X Y Z
Properties (transformation)
Alarm in the event of motion of re‐
dundant rotary axes
2)
$NT_CNTRL[n] Bit 21 No: Motion is permitted but
not included in calculation
Yes: Motion results in an
alarm
● No
● Yes (default)
= 0
= 1
Import rotary axis offset from ZO $NT_ROT_OFF‐
SET_FROM_FRAME[n]
Import offset of rotary axis
from ZO
● No
● Yes
End angle tolerance with interpo‐
lation through pole
$NT_POLE-LIMIT[n] End angle tolerance with
interpolation through pole
End angle tolerance for tool orien‐
tation
$NT_POLE_TOL[n] End angle tolerance for
tool orientation
Basic tool orientation
Direction vector X - Z $NT_BASE_ORIENT[n, 0 - 2] Tool orientation if no tool is
active
Normal vector X - Z $NT_BASE_ORIENT_NORMAL[n,
0 - 2]
Ignore active tool $NT_IGNORE_TOOL_ORIENT[n] No: Use orientation from
active tool
Yes: Always use the basic
tool orientation
● No
● Yes
1)
Varying numbers of input fields are displayed depending on the number of rotary axes in the tool or
workpiece chain.
Transformations
15.7 Assigning parameters to transformation types and tool carriers
SINUMERIK Operate (IM9)
Commissioning Manual, 12/2017, 6FC5397-1DP40-6BA1 339
 Loading...
Loading...

















