6
6.10 Parameter set changeover
6-577
Siemens AG 2005 All Rights Reserved
SIMODRIVE 611 universal Description of Functions (FBU) – 04.05 Edition
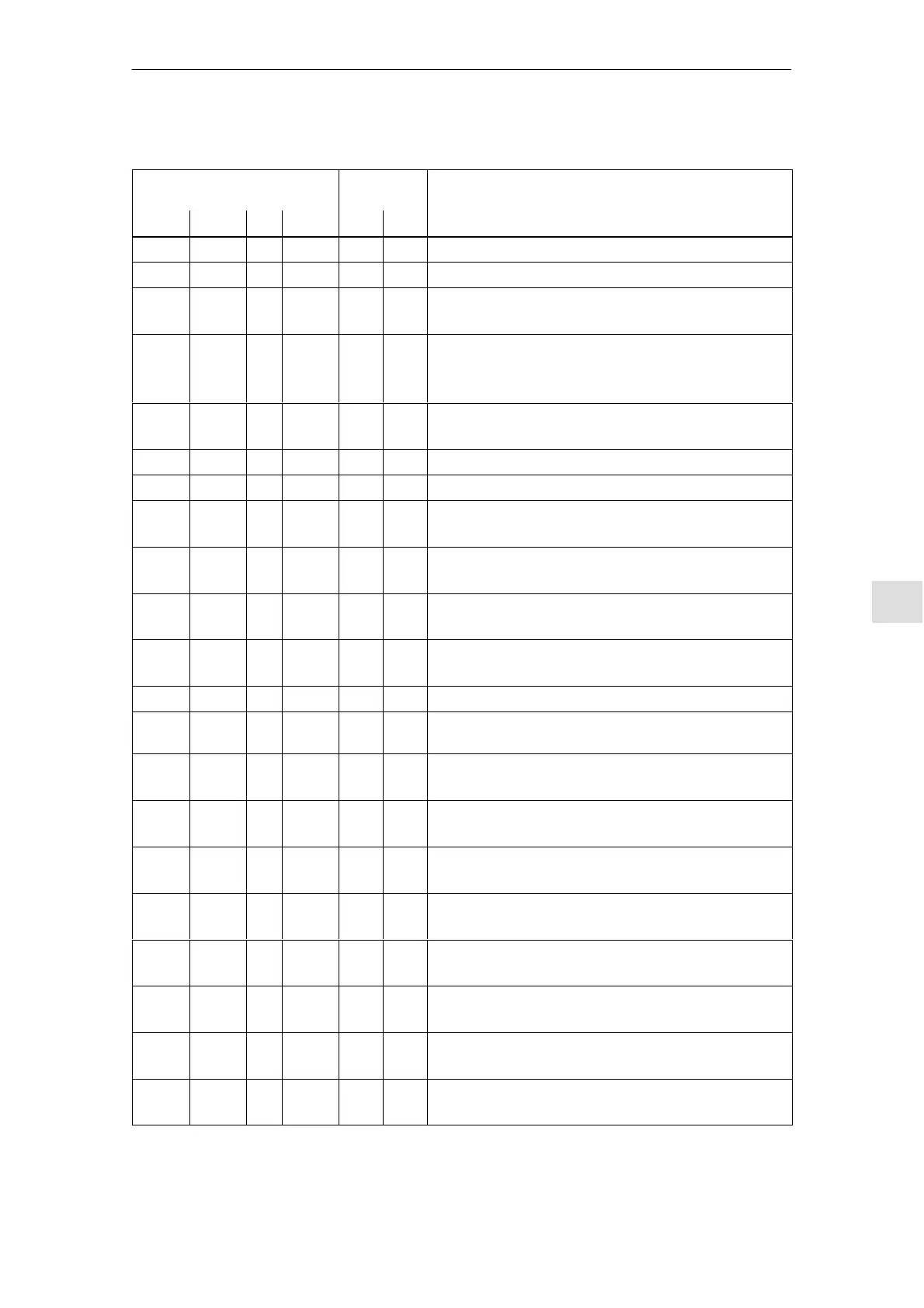
Table 6-59 Parameter set–dependent parameters, continued
Parameters for parameter set Operating
mode
0 Descriptionposn
set
7...1
0238:0 0238:1 ... 0238:7 x
1)
x Load revolutions
0318:0 0318:1 ... 0318:7 x
1)
x Dynamic following error monitoring tolerance
1123:0 1123:1 ... 1123:7 x x Load moment of inertia (ARM, SRM) (from SW 2.4)
Load mass (SLM)
1200:0
to
1221:0
1200:1
to
1221:1
...
...
1200:7
to
1221:7
x x Current Setpoint Filter
1230:0 1230:1 ... 1230:7 x x 1. Torque limit value (ARM, SRM)
1. Force limit value (SLM)
1233:0 1233:1 ... 1233:7 x x Regenerative limiting
1235:0 1235:1 ... 1235:7 x x 1. power limit value
1240:0 1240:1 ... 1240:7 x x Offset, torque setpoint (speed controlled) (ARM, SRM)
Offset, force setpoint (speed–controlled) (SLM)
1241:0 1241:1 ... 1241:7 x – Normalization, torque setpoint (ARM, SRM)
Normalization, force setpoint (SLM)
1242:0 1242:1 ... 1242:7 x – Offset, torque setpoint (torque controlled) (ARM, SRM)
Offset, force setpoint (open–loop torque contr.) (SLM)
1243:0 1243:1 ... 1243:7 x x Normalization, torque/power reduction (ARM, SRM)
Normalization, force/power reduction (SLM)
1256:0 1256:1 ... 1256:7 x – Ramp–function generator, ramp–up time (from SW 2.4)
1257:0 1257:1 ... 1257:7 x – Ramp–function generator, ramp–down time (from SW
2.4)
1401:0 1401:1 ... 1401:7 x x Speed for max. useful motor speed (ARM, SRM)
Velocity for max. useful motor velocity (SLM)
1405:0 1405:1 ... 1405:7 x x Monitoring speed, motor (ARM, SRM)
Monitoring velocity, motor (SLM)
1407:0 1407:1 ... 1407:7 x x P gain, speed controller (ARM, SRM)
P gain, velocity controller (SLM)
1408:0 1408:1 ... 1408:7 x x P gain, upper adaptation speed (ARM, SRM)
P–gain, upper adaptation velocity (SLM)
1409:0 1409:1 ... 1409:7 x x Integral action time, speed controller (ARM, SRM)
Integral action time, velocity controller (SLM)
1410:0 1410:1 ... 1410:7 x x Integral action time, upper adaptation speed (ARM, SRM)
Integral action time, upper adaptation velocity (SLM)
1414:0 1414:1 ... 1414:7 x x Natural frequency, reference model, speed (ARM, SRM)
Natural frequency, reference model, velocity (SLM)
1415:0 1415:1 ... 1415:7 x x Damping, reference model, speed (ARM, SRM)
Damping, reference model, velocity (SLM)
6 Description of the Functions
04.99
 Loading...
Loading...




