Coordinate transformation (FRAMES)
5.1 Coordinate transformation via frame variables
Job planning
282 Programming Manual, 07/2010, 6FC5398-2BP40-0BA0
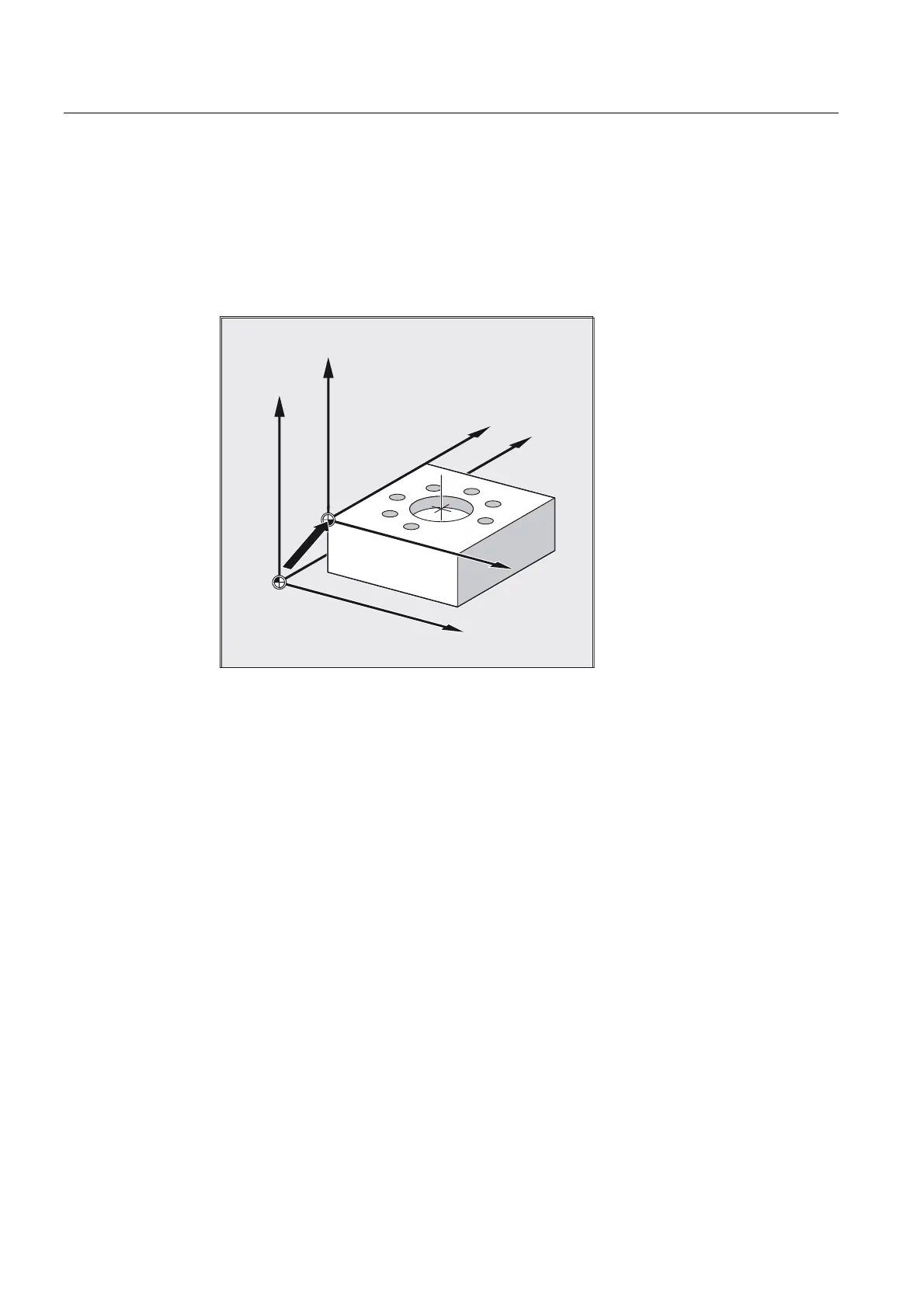
$P_IFRAME
Current, settable frame variable that establishes the reference between the basic origin
system (BOS) and the settable zero system (SZS).
●
$P_IFRAME corresponds to $P_UIFR[$P_IFRNUM]
● After
G54 is programmed, for example, $P_IFRAME contains the translation, rotation, scaling
and mirroring defined by G54.
=
<
;
=
;
<
%=6
%=6
%=6
6=6
6=6
6=6

 Loading...
Loading...














