Path traversing behavior
8.2 Feedrate response (FNORM, FLIN, FCUB, FPO)
Job planning
Programming Manual, 07/2010, 6FC5398-2BP40-0BA0
459
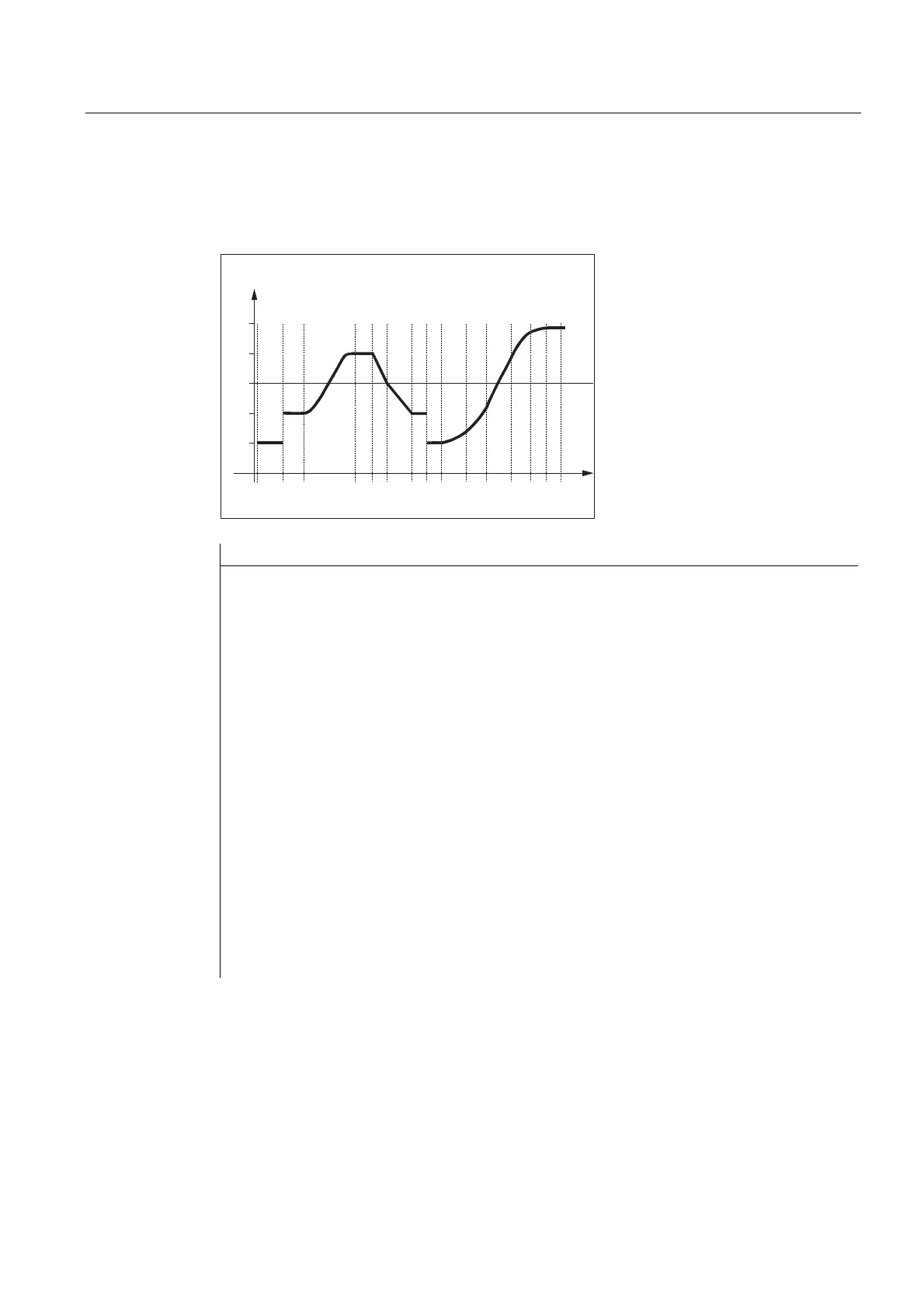
Example: Various feed profiles
This example shows you the programming and graphic representation of various feed
profiles.
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
)HHG
3DWK
Program code Comments
N1 F1000 FNORM G1 X8 G91 G64 ; Constant feedrate profile, incremental
dimension data
N2 F2000 X7 ; Setpoint velocity step change
N3 F=FPO(4000, 6000, -4000) ; Feed profile via polynomial with feed 4000
at the end of the block
N4 X6 ; Polynomial feedrate 4000 is valid as modal
value
N5 F3000 FLIN X5 ; Linear feedrate profile
N6 F2000 X8 ; Linear feedrate profile
N7 X5 Linear feedrate is valid as modal value
N8 F1000 FNORM X5 ; Constant feedrate profile with acceleration
step change
N9 F1400 FCUB X8 ; All of the following F values programmed in
blocks are connected with splines
N10 F2200 X6
N11 F3900 X7
N12 F4600 X7
N13 F4900 X5 ; Switch-out spline profile
N14 FNORM X5
N15 X20

 Loading...
Loading...














