Motion synchronous actions
10.4 Actions in synchronized actions
Job planning
Programming Manual, 07/2010, 6FC5398-2BP40-0BA0
585
2. Activate AC control
ID=1 DO SYNFCT(1,$AC_VC,$AA_LOAD[x])
;Read the current axis load (% of the max. drive current) via
$AA_LOAD[x],
calculate the path feedrate override with the polynomial defined above.
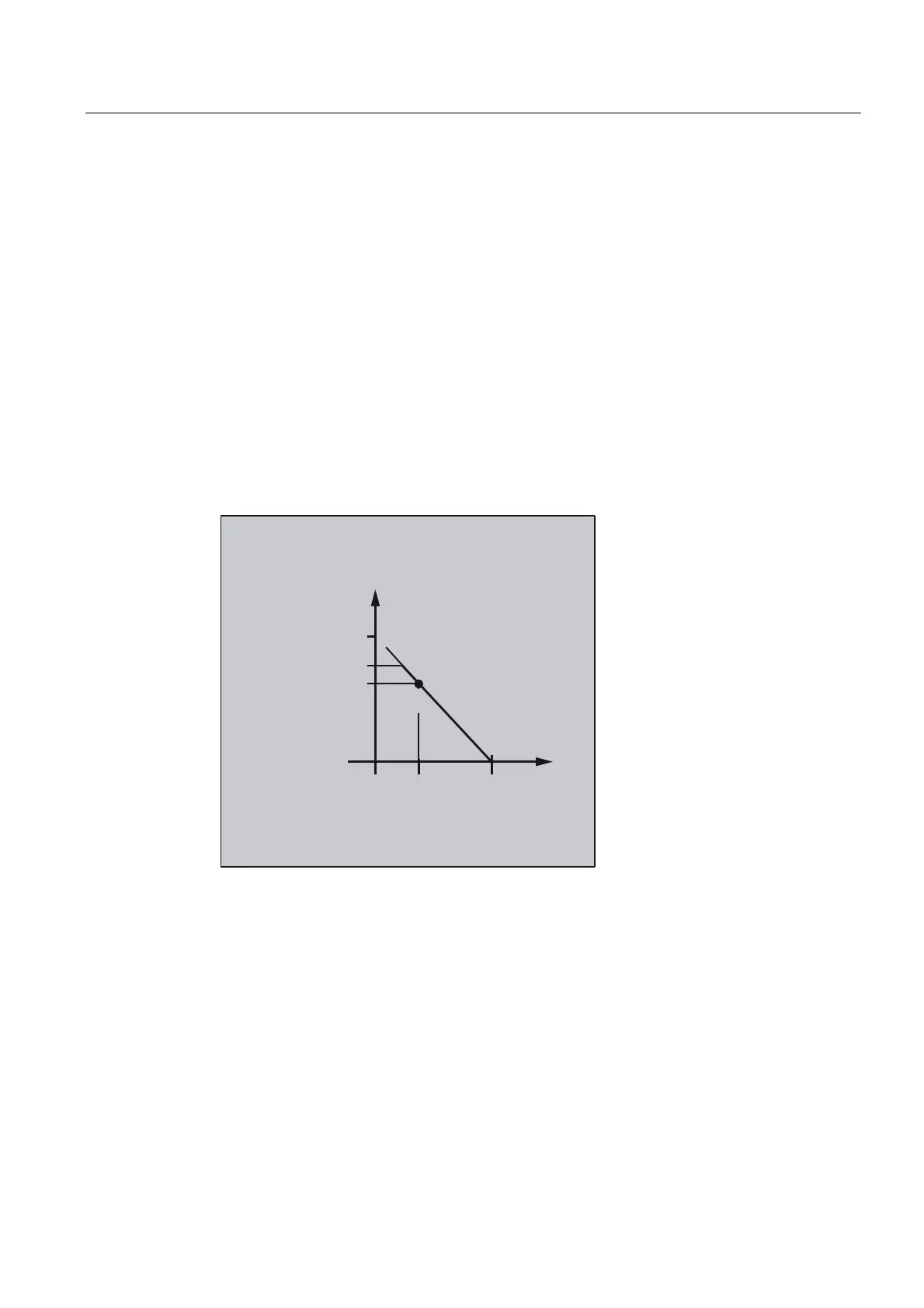
Example of adaptive control (multiplicative)
Influence the programmed feedrate by multiplication
The aim is to influence the programmed feedrate by multiplication. The feedrate must not
exceed certain limits – depending on the load on the drive:
● The feedrate is to be stopped at a drive load of 80%: override = 0
● At a drive load of 30% it is possible to traverse at programmed feedrate:
override = 100%.
The feedrate can be exceeded by 20%:
Max. override = 120%.
>@
295
>@
/RDG
/RZHUOLPLW
8SSHUOLPLW
1st polynomial definition
Determination of coefficients
y = f(x) = a
0
+ a
1
x +a
2
x
2
+ a
3
x
3
a
1
= -100%/(80-30)% = -2
a
0
= 100 + (2*30) = 160
a
2
= a
3
= 0 (neither a square nor cubic element)
Upper limit = 120
Lower limit = 0
This means:
FCTDEF(2,0,120,160,-2,0,0)

 Loading...
Loading...














